نویسنده : www.BartarFile.ir
تاریخ : جمعه 13 مرداد 1396
این کتاب درسی به صورت متعادل و با استفاده از ترمودینامیک، رفتار جامدات و مایعات را بررسی می نماید. در این کتاب همچنین مطالب ریاضیات پیشرفته جهت فهم بهتر فصل های اولیه کتاب ارائه شده است. این کتاب مشتمل بر 150 تمرین و همچنین حاوی مثال های کاربردی زیادی می باشد...
کتاب مقدمه ای بر مکانیک محیط های پیوسته (Introduction to Continuum Mechanics)، مشتمل بر 252 صفحه، در 14 فصل، با فرمت PDF، به زبان انگلیسی، همراه با مثال ها و تمرینات متعدد به ترتیب زیر گردآوری شده است:
نویسنده : www.BartarFile.ir
تاریخ : جمعه 13 مرداد 1396
پروفسور جی ان ردی یک استاد برجسته در دانشکده مهندسی مکانیک دانشگاه تگزاس می باشد. این استاد برجسته در سطح بین المللی به خاطر تبحر در علوم مکانیک محاسباتی و مکانیک کاربردی و همچنین تالیف 17 کتاب و ارائه بیش از 450 مقاله در ژورنال های مختلف علمی شناخته شده می باشد. کتاب مقدمه ای بر مکانیک محیط های پیوسته پروفسور ردی فرم غیرمادی و جزء را معرفی می نماید. در این کتاب فرم معادلات اساسی و برنامه های کاربردی آنها به مشکلات در کشش، مکانیک سیالات، و انتقال حرارت و معرفی مختصر به ویسکوالاستیک خطی را نیز ارائه می دهد. این کتاب برای دانشجویان تحصیلات تکمیلی بسیار ایده آل می باشد. همچنین این کتاب برای کسانی که به دنبال کار بیشتر در زمینه های دینامیک سیالات، انعطاف پذیری، صفحات و پوسته ها، ویسکوزولاسیون، پلاستیک و زمینه های بین رشته ای مانند ژئومکانیک، بیومکانیک، مکانیولوژی و علوم نانو هستند می تواند مفید واقع گردد...
کتاب مقدمه ای بر مکانیک محیط های پیوسته (Introduction to Continuum Mechanics)، مشتمل بر 480 صفحه، در 9 فصل، با فرمت PDF، به زبان انگلیسی، همراه با مثال ها و تمرینات متعدد به ترتیب زیر گردآوری شده است:
Chapter 1: Introduction
Continuum Mechanics
A Look Forward
Summary
Problems
Chapter 2: VECTORS AND TENSORS
Background and Overview
Vector Algebra
Definition of a Vector
Vector addition
Multiplication of a vector by a scalar
Linear independence of vectors
Scalar and Vector Products
Scalar product
Vector product
Triple products of vectors
Plane Area as a Vector
Reciprocal Basis
Components of a vector
General basis
Ortho normal basis
The Gram–Schmidt ortho normalization
Summation Convention
Dummy index
Free index
Kronecker delta
Permutation symbol
Transformation Law for Different Bases
General transformation laws
Transformation laws for orthonormal systems
Theory of Matrices
Definition
Matrix Addition and Multiplication of a Matrix by a Scalar
Matrix Transpose
Symmetric and Skew Symmetric Matrices
Matrix Multiplication
Inverse and Determinant of a Matrix
Positive-Definite and Orthogonal Matrices
Vector Calculus
Differentiation of a Vector with Respect to a Scalar
.Curvilinear Coordinates
The Fundamental Metric
Derivative of a Scalar Function of aVector
The Del Operator
Divergence and Curl of a Vector
Cylindrical and Spherical Coordinate Systems
Gradient, Divergence, and Curl Theorems
Tensors
Dyads and Dyadics
Nonion Form of a Second-Order Tensor
Transformation of Components of a Tensor
Higher-Order Tensors
Tensor Calculus
Eigenvalues and Eigenvectors
Eigenvalue problem
Eigenvalues and eigen vectors of a real symmetric tensor
Spectral theorem
Calculation of eigenvalues and eigen vectors
Summary
Problems
Chapter 3: KINEMATICS OF CONTINUA
Introduction
Descriptions of Motion
Configurations of a Continuous Medium
Material Description
Spatial Description
Displacement Field
Analysis of Deformation
Deformation Gradient
Isochoric, Homogeneous, and In homogeneous Deformation
Isochoric deformation
Homogeneous deformation
Nonhomogeneous deformation
Change of Volume and Surface
Volume change
Area change
Strain Measures
Cauchy Green Deformation Tensors
Green Lagrange Strain Tensor
Physical Interpretation of Green–Lagrange Strain Components
Cauchy and Euler Strain Tensors
Transformation of Strain Components
Invariants and Principal Values of Strains
Infinitesimal Strain Tensor and Rotation Tensor
Infinitesimal Strain Tensor
Physical Interpretation of Infinitesimal Strain
Tensor Components
Infinitesimal Rotation Tensor
Infinitesimal Strains in Cylindrical and Spherical
Coordinate Systems
Cylindrical coordinate system
Spherical coordinate system
Velocity Gradient and Vorticity Tensors
Relationship Between D and ˙E
Compatibility Equations
Preliminary Comments
Infinitesimal Strains
Finite Strains
Rigid-Body Motions and Material Objectivity
Superposed Rigid-Body Motions
Introduction and rigid-body transformation
Effect on F
Effect on C and E
Effect on L and D
Material Objectivity
Observer transformation
Objectivity of various kinematic measures
Time rate of change in a rotating frame of reference
Polar Decomposition Theorem
Preliminary Comments
Rotation and Stretch Tensors
Objectivity of Stretch Tensors
Summary
Problems
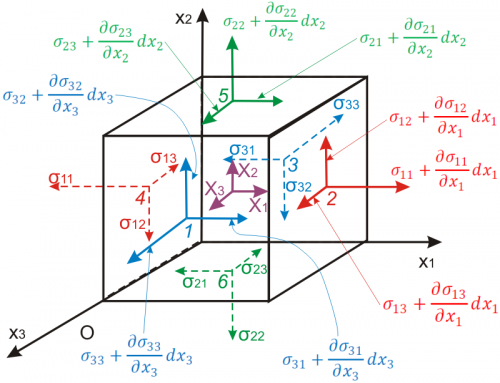
Chapter 4: STRESS MEASURES
Introduction
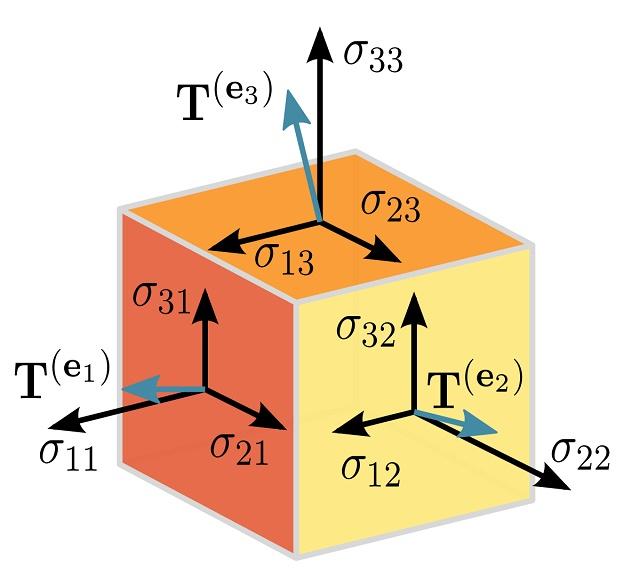
Cauchy Stress Tensor and Cauchy’s Formula
Stress Vector
Cauchy’s Formula
Cauchy Stress Tensor
Transformation of Stress Components and Principal Stresses
Transformation of Stress Components
Invariants
Transformation equations
Principal Stresses and Principal Planes
Maximum Shear Stress
Other Stress Measures
Preliminary Comments
First Piola Kirchhoff Stress Tensor
Second Piola Kirchhoff Stress Tensor
Equilibrium Equations for Small Deformations
Objectivity of Stress Tensors
Cauchy Stress Tensor
First Piola Kirchhoff Stress Tensor
Second Piola Kirchhoff Stress Tensor
Summary
Problems
Chapter 5: CONSERVATION AND BALANCE LAWS
Introduction
Conservation of Mass
Preliminary Discussion
Material Time Derivative
Vector and Integral Identities
Vector identities
Integral identities
Continuity Equation in the Spatial Description
Continuity Equation in the Material Description
Reynolds Transport Theorem
Balance of Linear and Angular Momentum
Principle of Balance of Linear Momentum
Equations of motion in the spatial description
Equations of motion in the material description
Spatial Equations of Motion in Cylindrical and Spherical Coordinates
Cylindrical coordinates
Spherical coordinates
Principle of Balance of Angular Momentum
Mono polar case
Multi polar case
Thermodynamic Principles
Balance of Energy
Energy equation in the spatial description
Energy equation in the material description
Entropy Inequality
Homogeneous processes
In homogeneous processes
Conservation and Balance Equations in the Spatial Description
Conservation and Balance Equations in the Material Description
نویسنده : www.BartarFile.ir
تاریخ : جمعه 16 تير 1396
این کتاب به تجزیه و تحلیل انواع مختلف تانسورها می پردازد. فصل اول این کتاب به جبر تانسوری یا به عبارت دیگر به جبر چند بعدی در یک میدان عمومی (F) مربوط می شود. فصل دوم زمینه جبری را به مجموعه ای از اعداد حقیقی (R) محدود می نماید. سایر فصول کتاب در ادامه پایین قابل مشاهده و پیگیری می باشد. بطور خلاصه این کتاب در تکمیل مطالب مربوط به فصل تانسورها که در درس مکانیک محیط های پیوسته بیان می گردد می تواند مفید واقع گردد...
کتاب تانسورها - ریاضیات نظریه نسبیت و مکانیک پیوسته (Tensors - The Mathematics of Relativity Theory and Continuum Mechanics)، مشتمل بر 300 صفحه، در 7 فصل، با فرمت PDF، به زبان انگلیسی، همراه با مثال ها و تمرینات متعدد به ترتیب زیر گردآوری شده است:
Chapter 1: Finite Dimensional Vector Spaces and Linear Mappings
Fields
Finite-Dimensional Vector Spaces
Linear Mappings of a Vector Space
Dual or Covariant Vector Spaces
Chapter 2: Tensor Algebra
Second-Order Tensors
Higher Order Tensors
Exterior or Grassmann Algebra
Inner Product Vector Spaces and the
Metric Tensor
Chapter 3: Tensor Analysis on a Differentiable Manifold
Differentiable Manifolds
Tangent Vectors, Cotangent Vectors, and Parametrized Curves
Tensor Fields over Differentiable Manifolds
Differential Forms and Exterior Derivatives
Chapter 4: Differentiable Manifolds with Connections
The Affine Connection and Covariant Derivative
Covariant Derivatives of Tensors along a Curve
Lie Bracket, Torsion, and Curvature Tensor
Chapter 5: Riemannian and Pseudo-Riemannian Manifolds
Metric Tensor, Christoffel Symbols and Ricci Rotation Coefficients
Covariant Derivatives and the Curvature Tensor
Curves, Frenet Serret Formulas and Geodesics
Special Coordinate Charts
Chapter 6: Special Riemannian and Pseudo-Riemannian Manifolds
Flat Manifolds
The Space of Constant Curvature
Einstein Spaces
Conformally Flat Spaces
Chapter 7: Hypersurfaces, Submanifolds, and Extrinsic Curvature
Two-Dimensional Surfaces Embedded in a Three Dimensional Space
جهت دانلود کتاب تانسورها - ریاضیات نظریه نسبیت و مکانیک پیوسته (Tensors - The Mathematics of Relativity Theory and Continuum Mechanics)، بر لینک زیر کلیک نمایید:
نویسنده : www.BartarFile.ir
تاریخ : جمعه 14 آبان 1395
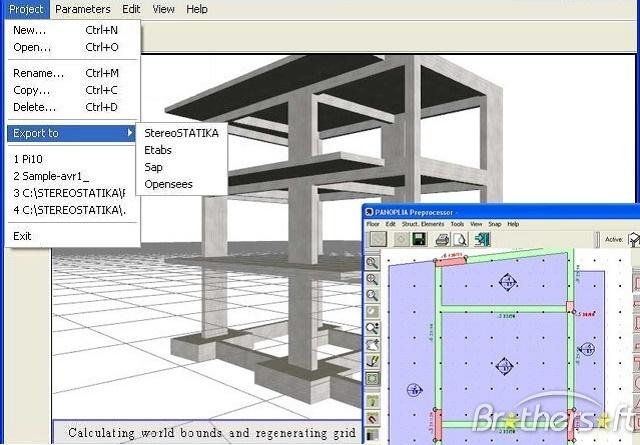
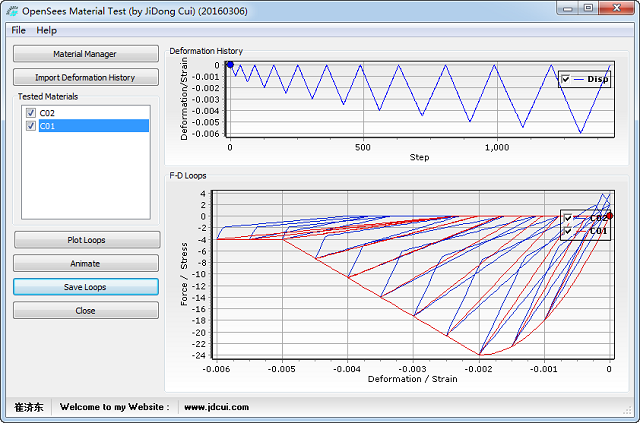
نرم افزار openSees یك نرم افزار كدباز و رایگان است كه با استفاده از روش اجزا محدود به تحلیل انواع سازه ها می پردازد. نام این نرم افزار به صورت مخفف از حروف اول کلمات عبارت Open System for Earthquake Engineering Simulation به معنای سیستم باز جهت شبیه سازی در مهندسی زلزله، گرفته شده است. این نرم افزار توسط زبان برنامه نویسی TCL/TK تولید شده است كه قابلیت گسترش و تولید انواع مقاطع سازه ای و غیر سازه ای در خصوص تحلیل را داراست. نرم افزار openSees توسط اعضای دانشگاه كالیفرنیا تهیه و پخش شده است كه در این خصوص هیچ شركت و كمپانی دخیل نمی باشد و این هیأت هیچ ضمانتی در خصوص نتایج حاصل از آنالیز ارائه نداده است. هدف از تهیه نرم افزار openSees پیشبرد هر چه بیشتر تحقیقات می باشد كه دانشگاه های جهان روزانه با آن درگیر هستند. از آنجایی که این نرم افزار کد باز می باشد، محققین می توانند مصالح و دستورهای جدید را به کتابخانه این نرم افزار اضافه کنند و رایگان بودن این نرم افزار موجب می شود که به راحتی بتوان در مقالات معتبر جهانی از این نرم افزار بدون نیاز به پرداخت هزینه و خرید، استفاده نمود، که در مقایسه با نرم افزارهای تجاری دیگر مزیت بسیار مهمی می باشد.
نرم افزار openSees دارای یک آرشیو کامل از انواع رفتارهای خطی و غیرخطی در خصوص تعریف مصالح، المان های فولادی و بتنی و تعریف المان های مختلف در خصوص مدل سازی می باشد. بجز عناصری که در آرشیو موجودی می باشد، کاربر می تواند بصورت اختیاری نیز نوعی از مواد و مصالح و المان ها را برای مدلسازی خود تعریف کند. نرم افزار قادر به تحلیل انواع مدل های خطی و غیر خطی سازه ای و ژئوتکنیکی می باشد. تحلیل ها بصورت انواع تحلیل های استاتیکی و دینامیکی در حالت خطی و غیر خطی انجام می شود که معروف ترین آنها بصورت زیر آورده شده است:
نرم افزار openSees قادر به مدلسازی انواع قسمت های یک المان سازه ای می باشد. می توان گفت نرم افزار فوق تمام قسمت های یک قاب سازه از هر نوعی با هر مصالحی را مدل می نماید. میلگردهای موجود در سطح مقطع یک عنصر، بتن اطراف میلگردها با پوشش حداقل و حداکثر، خستگی در المان ها تحت اثر هر نوع بارگذاری، رفتار هیسترزیس بصورت منحنی نیرو تغییر مکان و... از جمله مسائلی هستند که نرم افزار فوق قادر به مدل کردن و تحلیل آنها می باشد...
نویسنده : www.BartarFile.ir
تاریخ : جمعه 14 آبان 1395
با رشد روزافزون علم مکاترونیک و رباتیک در عرصه جهانی و به موازات آن، پیشرفت این علم در داخل کشور و استقبال چشمگیر علاقمندان مستعد ایرانی از این علم، ضرورت وجود منابع مرجع جهت استفاده علاقمندان روز به روز بیشتر احساس می شود. کتابی که هم اکنون پیش روی شماست، تلاشی است با هدف ارائه مرجعی عملی به دوستانی که قصد ورود به این عرصه را دارند. در این کتاب هر فصل با ابتدایی ترین مباحث شروع می گردد و تا ایجاد یک دید عملی در خواننده ادامه می یابد. تمامی مباحث عملی این کتاب حاصل تجربیات شخصی مولفین در طول پروژه ها و ربات های مختلف می باشد. فصل اول معرفی مختصری از مسابقات رباتیک بوده و در فصل دوم مباحث مکانیکی طراحی ربات مطرح شده و در فصل سوم مباحثی از الکترونیک پایه ربات و در فصل چهارم نحوه برنامه نویسی ربات ارائه شده است...
نویسنده : www.BartarFile.ir
تاریخ : جمعه 14 آبان 1395
به طور كلی تمام بلبرینگ های غلتشی از دو عدد رینگ و مجموعه ای از اجزاء غلتنده كه در مسیر مشخصی داخل رینگ ها حركت می كنند، تشكیل شده اند. شكل های استاندارد این اجزاء شامل ساچمه، رولر استوانه ای، رولر سوزنی، رولر مخروطی، رولر بشكه ای متقارن و رولر بشكه ای نا متقارن می باشد. همچنین اجزای غلتنده، با قفسه ای مهار شده اند تا همواره فاصله آنها از هم ثابت مانده و از برخورد و تماس آنها جلوگیری شود. در رولبرینگ های سوزنی و رولبرینگ های كروی خود تنظیم بدون لبه برآمده (روی رینگ داخلی)، قفسه باید موقعیت مناسب محور دوران رولرها را نیز تضمین نماید. در بلبرینگ های قابل تفكیك، قفسه ها وظیفه دیگری نیز دارند كه نگه داشتن مجموعه اجزاء كنار هم می باشد. این امر باعث تسهیل در نصب بلبرینگ ها می شود.
اكثراً رینگ ها و اجزاء غلتنده را از فولاد های كروم داری می سازند كه توانایی سختی پذیری تا مغز قطعه را داشته باشند. در بعضی موارد نیز از فولادهای سخت شونده سطحی استفاده می گردد. قطعات بلیرینگ های غلتشی بزرگ، مثل بلیرینگ های مفصلی بزرگ، از كونچ و تمپر كردن فولاد با قابلیت سختی پذیری سطحی، تولید می شوند و فقط سطوح تماس سخت می گردند. در بلیرینگ های ویژه كه تحت بار، سرعت، حرارت و یا خوردگی بالایی كار می كنند از فولادهای مقاوم به حرارت یا فولادهای زنگ نزن به همراه پلاستیك، سرامیك یا مواد مخصوص دیگر بنا به مورد كاربرد استفاده می شود.
نویسنده : www.BartarFile.ir
تاریخ : شنبه 8 آبان 1395
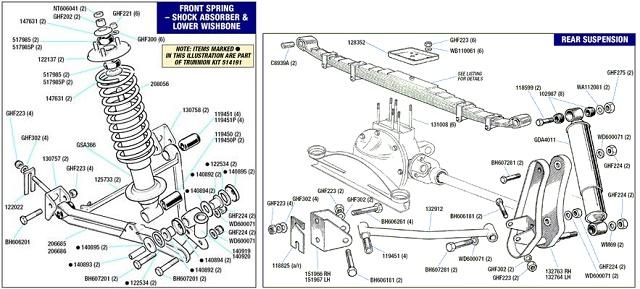
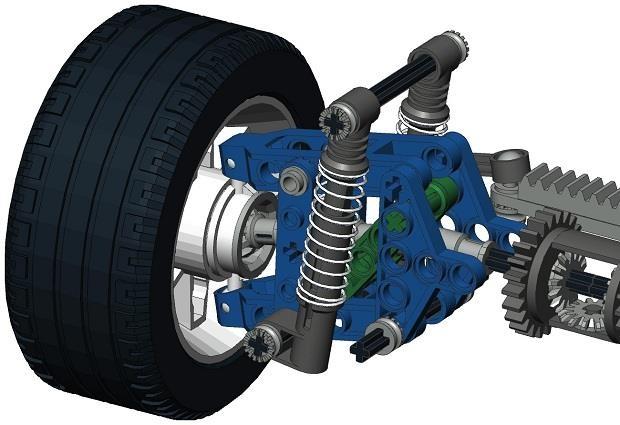
كمك فنر به همان اندازه كه ایمنی حركت را تضمین می كند، وظیفه خوش سواری را نیز بر عهده دارد. كمك فنر باید از پریدن (جهیدن) چرخ ها جلوگیری نماید، یعنی تماس بین چرخ و جاده را همیشه برقرار سازد همچنین كله زدن خودرو را میرا كند. با طراحی و ساخت سیستم های تعلیق جدید با قطعات نگهدارنده و راهنمای کم اصطکاک و افزایش سرعت و توان خودرو امروزه انتظارات از این قطعه نسبت به سال های گذشته به مراتب بیشتر است. از این رو هر خودرو، كمك فنر خاص خود را دارد. كمك فنر نیز مانند لاستیك و لنت ترمز، تنش و شرایط كاری دشوار را تحمل می كند و از این رو نیاز به بازدید منظم دارد. تعویض به هنگام كمك فنر می تواند بر ایمنی راننده و سرنشینان اثر مهمی بگذارد. البته در این باره مشكلاتی وجود دارد. فرسودگی و کارکرد لاستیک را می توان به خوبی از سایش عاج لاستیک دریافت. اما از آنجا که کمک فنر در داخل شاسی قرار دارد، بازرسی آن ساده نیست. مشکل دیگر این است که آزمایش کارکرد کمک فنر نصب شده دشوار است...
پروژه روش طراحی انواع کمک فنرها، مشتمل بر 6 فصل، 171 صفحه، تایپ شده، به همراه تصاویر و فرمول های مهم طراحی، با فرمت pdf جهت دانلود قرار داده شده است و فصل بندی پروژه به ترتیب زیر می باشد:
نویسنده : www.BartarFile.ir
تاریخ : شنبه 8 آبان 1395
مطالب این جزوه از منابع مختلف جمع آوری، ترجمه و تدوین گردیده است. ضمن رعایت اصل موضوع سعی شده است حتی الامکان مطالب به زبان ساده و قابل استفاده برای کلیه کارکنان محترم صنعت بیان شود. همچنین برای آشنایی با لغات و اصطلاحات انگلیسی فنی مرتبط با یاتاقان ها از حذف زیر نویس انگلیسی شکل ها خودداری شده است. در این جزوه شما با کاربرد، تقسیم بندی کلی، انتخاب، ساختمان اصلی، جنس، طرز کار، مزایا و معایب، طریقه نگهداری و نکات معمول تعمیراتی و همچنین با اشکالات عمومی انواع یاتاقان ها و نحوه برطرف کردن آنها آشنا می شوند...
جزوه آشنایی با انواع یاتاقان ها، مشتمل بر 115 صفحه، با فرمت pdf، به زبان فارسی، همراه با تصاویر، جداول، روابط مهم و فرمول های کاربردی، به ترتیب زیر گردآوری شده است:
نویسنده : www.BartarFile.ir
تاریخ : شنبه 8 آبان 1395
امروزه سیستم های کنترل رکن اصلی هدایت پروسه ها در مراکز بزرگ صنعتی محسوب می شوند. منظور از مجتمع های بزرگ مجموعه هایی چون:
پالایشگاه های نفت وگاز
مجتمع های پتروشیمی
نبروگاه های آبی، بخاری و سیکل ترکیبی
کارخانجات تولید فولاد، مس و مواد معدنی
کارخانجات سیمان
و موارد دیگری که در مقیاس این گونه صنایع هستند، می باشد. در حال حاضر سیستم های کنترل این گونه واحدهای صنعتی کاملا مبتنی بر کامپیوتر هستند، در صورتی که تا چند دهه قبل تماما پنوماتیکی و الکترومکانیکی بودند. فضای زیادی نیز برای نمایش وضعیت پروسس مورد نیاز بود. سیستم های کنترل به کار رفته در این چنین صنایعی به لحاظ ساختار، طراحی و نحوه پیاده سازی با سیستم های کنترل مورد استفاده در صنایع کوچک و متوسط نظیر کارخانجات تولید مواد غدایی، اتومبیل سازی، کاشی و سرامیک و امثالهم، تفاوت هایی دارد که در این کتاب به تشریح ویژگی های این سیستم ها و تفاوت های اشاره شده پرداخته خواهد شد...
کتاب آشنایی با سیستم کنترل توزیع شده (Distributed Control System)، مشتمل بر 5 فصل، 151 صفحه، با فرمت pdf، به زبان فارسی، همراه با تصاویر، جداول، نکات مهم و کاربردی، به ترتیب زیر گردآوری شده است:
فصل 1: آشنایی با سیستم کنترل فرآیند (Process Control Systems)
سیستم های کنترل در مجتمع های بزرگ
مدل های مختلف کنترل
Factory Automation
Process Automation
کنترل پروسس (Process Control)
Field Instrument
Actuator
Single Controller
PID LOOP
ویژگی های Process Control System
مشخصات Process Plant های واقعی
فصل 2: آشنایی با سیستم های کنترل غیر متمرکز (Decentralized Control Systems)
تعریف سیستم Decentralized Control Systems
ساختار سیستم های DCS Architecture
ساختار متمرکز (Centralized Architecture)
ساختار غیر متمرکز (Decentralized Architecture)
معماری متعارف یک سیستم DCS
اجزای یک سیستم DCS
Field Level
Control Level
Monitoring Level
Engineering Station
Operating Station
مدل های مختلف ارتباطی در سیستم های DCS
مدل Client – Server
مدل Stand-alone Station
فصل 3: آشنایی با نرم افزار سیستم های DCS
نرم افزار سیستم های DCS
ساختار نرم افزار
Hardware Configuration
Network Configuration
Program Development
Graphic Design
ساختار برنامه
سلسله مراتب (Hierarchy)
Control Function Chart
Sequential Function Chart
Data base
Data base مرکزی یا Single Data base
Data base توزیع شده یا Distributed Database
سایر امکانات نرم افزار سیستم های DCS
کتابخانه (Library)
Graphical Dynamic Objects
SFC Visualization
OLE for Process Control
Sequence of Events
فصل 4: تفاوت های سیستم های کنترل PLC و DCS
مقدمه
تفاوت های سیستم های کنترل PLC و DCS
ظرفیت یا تعداد I/O
کاربرد یا نوع I/O
زمان مهندسی
Redundancy
مانیتورینگ
Networking
فصل 5: آشنایی با DCS های مطرح در دنیا
معرفی سیستم Industrial IT از شرکت ABB
معرفی سیستم Delta V از شرکت Fisher-Rosemount
معرفی سیستم I/A Series از شرکت FOXBORO
معرفی سیستم PKS Experion از شرکت Honeywell
معرفی سیستم PCS7 از شرکت SIEMENS
معرفی سیستم Teleperm XP از شرکت SIEMENS
معرفی سیستم CENTUM 3000 R3 از شرکت YOKOGAWA
جهت دانلود کتاب آشنایی با سیستم کنترل توزیع شده (Distributed Control System)، بر لینک زیر کلیک نمایید:
برتر فایل یک سایت مرجع با هدف انتشار تحقیق، مقاله، پایان نامه، پاورپوینت، جزوه، کتاب و همچنین فایل های آموزشی از نرم افزار پیشرفته CATIA در زمینه رشته مهندسی مکانیک است که به منظور دسترسی راحت تر، سریع تر و ارزان تر شما دانشجویان و پژوهشگران به تحقیقات مد نظرتان تاسیس شده است.














 آمار
وبلاگ:
آمار
وبلاگ: