نویسنده : www.BartarFile.ir
تاریخ : دو شنبه 6 شهريور 1396
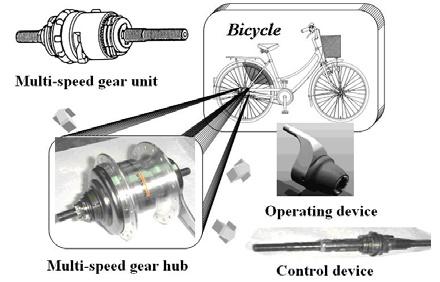
Recently, bicycles are used as exercising machines and traffic vehicles. Planetary gear trains can be used as the transmission systems for bicycles. The purpose of this work is to propose a design methodology for the kinematic design of automatic gear transmissions with planetary gear trains for bicycles. First, applying the check list method (combining and extending methods), the design concepts are proposed. Then, based on the the design concepts proposed and train value equation of planetary gear train, we derive the gear ratio equations of automatic three-speed gear transmissions for each invention. Three automatic three-speed gear transmissions are designed to illustrate the design methodology. Based on the proposed methodology, all automatic gear transmissions with planetary gear trains can be synthesized.
مقاله طراحی سیستم تعویض دنده اتوماتیک دوچرخه، مشتمل بر 8 صفحه، به زبان انگلیسی، تایپ شده، به همراه تصاویر، فرمول ها و روابط ریاضی با فرمت pdf، به ترتیب زیر گردآوری شده است:
نویسنده : www.BartarFile.ir
تاریخ : دو شنبه 6 شهريور 1396
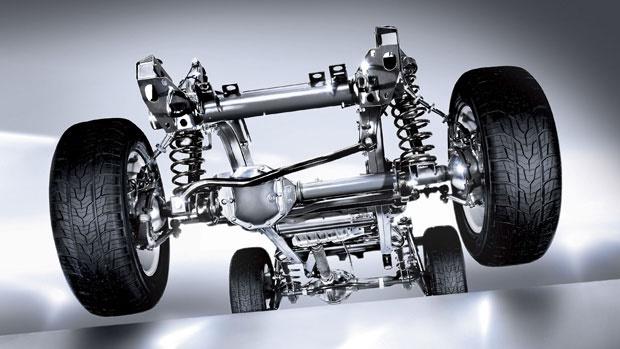
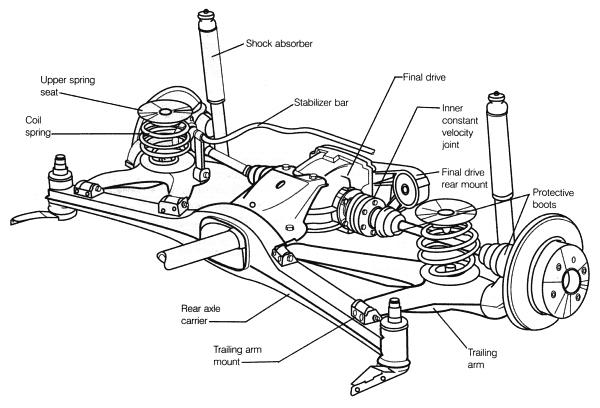
بین سیستم تعلیق اکسل جلو که فرمان پذیر است و ممکن است که محرک هم باشد و سیستم تعلیق اکسل عقب تفاوت وجود دارد. همچنین بین اکسل یکپارچه یعنی سیستم تعلیق ثابت و سیستم تعلیق مستقل تمایز آشکاری وجود دارد. سیستم تعلیق طبق دار دوبل و سیستم تعلیق مک فرسون استرات دو نوع سیستم تعلیق مستقل می باشد که نیاز به فضای کمی در کناره ها و وسط خودرو دارد. در این پروژه به بررسی انواع سیستم های تعلیق با توجه به جلو محرک، عقب محرک و چهار چرخ محرک بودن آنها پرداخته می شود و مزایا و معایب هریک بیان می گردد. سپس هندسه مرکز و محورهای غلتش بیان می گردد. در پایان حرکت چرخ ها و زوایای چرخ و فرمان و همچنین تاثیر نیروهای مختلف روی تغییرات زوایا و موقعیت چرخ ها بررسی می گردد...
نویسنده : www.BartarFile.ir
تاریخ : دو شنبه 6 شهريور 1396
زمانی که بر روی یک سطح صاف قرار می گیرید، وظیفه سیستم تعلیق (فنربندی) خودرو، کار آسانی به نظر می رسد. اما اگر سرعت گیرها کمتر به شما ضربه وارد کنند آن وقت متوجه می شوید که اهمیت سیستم تعلیق چیست. حقیقت این است که سیستم تعلیق خودرو حجم کار زیادی را در خودرو به دوش دارد. هر قطعه این سیستم بیشتر از هر عضو دیگری فشار را تحمل می کند. سیستم تعلیق یا فنربندی خودرو میان بدنه و چرخ های خودرو قرارگرفته است و به منظور برآورده کردن اهداف مهمی در خودرو به کارگرفته می شود. در حالت ایده آل، یک سیستم تعلیق مناسب و سالم، ضربات و دیگر ناهمواری های جاده را جذب می کند. به این ترتیب ضربه اثری بر کابین داخلی خودرو نداشته و سرنشینان با آرامش بیشتری به مسیر ادامه می دهند. این ویژگی سیستم تعلیق، از دیدگاه مسافر اهمیت بسیار بالایی دارد، درحالی که ممکن است راننده به دیگر فواید این سیستم نیز آشنا باشد. همچنین فنربندی خودرو وظیفه دارد که تا حد ممکن چرخ های خودرو را به زمین بچسباند. در سیستم تعلیق ایستا هیچ منبع انرژی بیرونی وجود نداشته و این سیستم تنها توانایی بازیابی و میرایش انرژی را دارد. بنابراین اثرات ناخواسته و ناراحت کننده حرکات غلتش بدنه در هنگام چرخش خودرو، کله زدن بدنه در هنگام شتاب گیری و ترمزدهی، بلند شدن و جابه جایی مانای بدنه نسبت به سیستم تعلیق در هنگام چرخش پایدار خودرو و ... هیچگاه از بین نمی رود. از آنجا که در این سیستم منبع انرژی بیرونی وجود ندارد، بنابراین ساده، ارزان و قابل اعتماد است. در بیشتر این سیستم ها مقادیر سختی فنر و میرایی لرزه گیر ثابت بوده و با برگزیدن ضرایب مناسب و کاهش بلندی گرانیگاه خودرو می توان به کیفیت خوش سواری و فرمان پذیری خوبی دست یافت. فنر نرم بر واکنش شتاب گیری، ترمز گیری و چرخش خودرو تاثیرات منفی دارد.
هدف این پروژه بررسی سیستم تعلیق خودرو برای بدست آوردن بهترین شرایط کنترلی و پایداری سیستم می باشد تا نهایتا خروجی مطلوب حاصل گردد. البته دلیل عمده و هدف اصلی انتخاب این پروژه اهمیت سیستم تعلیق در راحتی و آسایش سرنشینان خودرو در مقابل ناهمواری ها که به صورت اغتشاشات عملکرد سیستم تعلیق را تحت تاثیر قرار می دهد بوده است و خواسته یک مهندس کنترل نیز جدا از این موضوع نیست...
نویسنده : www.BartarFile.ir
تاریخ : دو شنبه 6 شهريور 1396
امروزه برای انتقال قدرت از یک شافت به شافت دیگر، کوپلینگ ها به کثرت مورد استفاده قرار می گیرند. در این رابطه، بررسی مکانیزم حرکت آنها و شبیه سازی آن از اهمیت ویژه ای برخوردار است. یکی از انواع کوپلینگ هایی که کاربردهای فراوانی دارد، کوپلینگ یونیورسال می باشد. در این مقاله ابتدا مقداری راجع به این نوع کوپلینگ ها و تئوری حرکت آنها صحبت می شود، سپس به کمک نرم افزار Working Model مکانیزم حرکت آنها شبیه سازی گردیده و نتایج بدست آمده مورد تجزیه و تحلیل قرار می گیرد...
مقاله بررسی کوپلینگ های یونیورسال و شبیه سازی مکانیزم آنها به کمک نرم افزار Working Model، مشتمل بر 9 صفحه، به زبان فارسی، تایپ شده، به همراه تصاویر، دیاگرام، فرمول ها و روابط ریاضی با فرمت pdf، به ترتیب زیر گردآوری شده است:
نویسنده : www.BartarFile.ir
تاریخ : دو شنبه 6 شهريور 1396
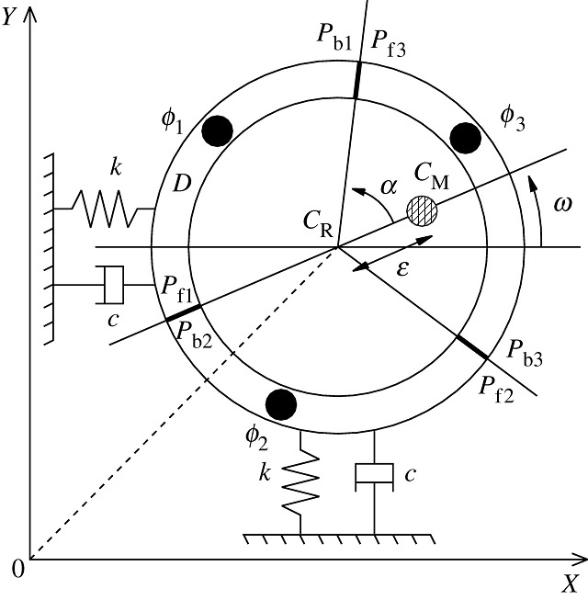
در این مقاله با انتخاب یک روتور صفحه ای جفکات به عنوان ماشین دوار، معادلات حاکم بر حرکت روتور و پاسخ سیستم دوار به نابالانسی و خم استاتیکی موجود در آن (شامل دامنه و فاز پاسخ) استنتاج می شوند. در ادامه با بکارگیری یک بالانسر رینگ و گلوله به عنوان اتوبالانسر انفعالی بر روی ماشین دوار، به استنتاج معادلات حرکت، تحلیل پایداری و بدست آوردن پاسخ های زمانی سیستم پرداخته می شود. تحلیل پایداری سیستم حول وضعیت های تعادل آن برای اتوبالانسری با یک و دو گلوله، بر اساس معیار روت هاویتز انجام شده است. پاسخ های زمانی سیستم در جهت تایید تحلیل پایداری انجام گرفته، ارائه شده است...
مقاله بالانس اتوماتیک ماشین های دوار با استفاده از یک سیستم بالانس کننده انفعالی و تعیین محدوده های پایدار آن، مشتمل بر 9 صفحه، به زبان فارسی، تایپ شده، به همراه تصاویر، دیاگرام، فرمول ها و روابط ریاضی با فرمت pdf، به ترتیب زیر گردآوری شده است:
نویسنده : www.BartarFile.ir
تاریخ : دو شنبه 6 شهريور 1396
کتاب مدلسازی و تحلیل سیستم های دینامیکی (Modeling and Analysis of Dynamic Systems)، مشتمل بر 10 فصل، 558 صفحه، به زبان انگلیسی، همراه با تصاویر، فرمول ها و جداول مهم، با فرمت pdf، به ترتیب زیر گردآوری شده است:
Chapter 1: Introduction to MATLAB, Simulink, and Simscape
MATLAB Command Window and Command Prompt
User Defined Functions and Script Files
Creating a Script File
Defining and Evaluating Functions
Iterative Calculations
Matrices and Vectors
Differentiation and Integration
Plotting in MATLAB
Plotting Data Points
Plotting Analytical Expressions
Simulink
Block Library
Building a New Model
Simulation
Simscape
Block Library
Building a New Model and Simulation
Simulation
Chapter 2: Complex Analysis, Differential Equations, and Laplace Transformation
Complex Analysis
Complex Numbers in Rectangular Form
Magnitude
Complex Conjugate
Complex Numbers in Polar Form
Complex Algebra Using the Polar Form
Integer Powers of Complex Numbers
Roots of Complex Numbers
Complex Variables and Functions
Differential Equations
Linear, First-Order Differential Equations
Second-Order Differential Equations with Constant Coefficients
Homogeneous Solution
Particular Solution
Laplace Transformation
Linearity of Laplace and Inverse Laplace Transforms
Differentiation and Integration of Laplace Transforms
Differentiation of Laplace Transforms
Integration of Laplace Transforms
Special Functions
Unit-Step Function
Unit-Ramp Function
Unit-Pulse Function
Unit-Impulse (Dirac Delta) Function
The Relation between Unit-Impulse and Unit-Step
Functions
Periodic Functions
Laplace Transforms of Derivatives and Integrals
Laplace Transforms of Derivatives
Laplace Transforms of Integrals
Inverse Laplace Transformation
Partial-Fraction Expansion Method
Performing Partial Fractions in MATLAB
Convolution Method
Final-Value Theorem and Initial-Value Theorem
Final-Value Theorem
Initial-Value Theorem
Summary
Chapter 3: Matrix Analysis
Vectors and Matrices
Special Matrices
Elementary Row Operations
Rank of a Matrix
Determinant of a Matrix
Properties of Determinant
Rank in Terms of Determinant
Block Diagonal and Block Triangular Matrices
Inverse of a Matrix
Adjoint Matrix
Solution of Linear Systems of Equations
Gauss Elimination Method
Using the Inverse of the Coefficient Matrix
Cramer’s Rule
Homogeneous Systems
Matrix Eigenvalue Problem
Solving the Eigenvalue Problem
Algebraic Multiplicity and Geometric Multiplicity
Generalized Eigenvectors
Similarity Transformations
Matrix Diagonalization
Defective Matrices
Summary
Chapter 4: System Model Representation
Configuration Form
Second-Order Matrix Form
State-Space Form
State Variables, State-Variable Equations, State Equation
State-Variable Equations
State Equation
Output Equation, State-Space Form
Output Equation
State-Space Form
Decoupling the State Equation
Input–Output Equation, Transfer Function
Input–Output Equations from the System Model
Transfer Functions from the System Model
Relations between State-Space Form, Input–Output Equation and Transfer Matrix
Input–Output Equation to State-Space Form
Controller Canonical Form
State-Space Form to Transfer Matrix
Block Diagram Representation
Block Diagram Operations
Summing Junction
Series Combinations of Blocks
Parallel Combinations of Blocks
Integration
Closed-Loop Systems
Block Diagram Reduction Techniques
Moving a Branch Point
Moving a Summing Junction
Mason’s Rule
Block Diagram Construction from System Model
Linearization
Linearization of a Nonlinear Element
Functions of Two Variables
Linearization of a Nonlinear Model
Operating Point
Linearization Procedure
Small-Angle Linearization
Linearization with MATLAB Simulink
Summary
Chapter 5: Mechanical Systems
Mechanical Elements
Mass Elements
Spring Elements
Damper Elements
Equivalence
Translational Systems
Degrees of Freedom
Newton’s Second Law
Free-Body Diagrams
Static Equilibrium Position and Coordinate Reference
Massless Junctions
D’Alembert’s Principle
Rotational Systems
General Moment Equation
Modeling of Rigid Bodies in Plane Motion
Mass Moment of Inertia
Pure Rolling Motion
Mixed Systems: Translational and Rotational
Force and Moment Equations
Energy Method
Gear–Train Systems
System Modeling with Simulink and Simscape
Translational Systems
Rotational Systems
Summary
Chapter 6: Electrical, Electronic, and Electromechanical Systems
Electrical Elements
Resistors
Inductors
Capacitors
Electric Circuits
Kirchhoff’s Voltage Law
Kirchhoff’s Current Law
Node Method
Loop Method
State Variables of Circuits
Operational Amplifiers
Electromechanical Systems
Elemental Relations of Electromechanical Systems
Armature-Controlled Motors
Field-Controlled Motors
Impedance Methods
Impedances of Electric Elements
Series and Parallel Impedances
Mechanical Impedances
System Modeling with Simulink and Simscape
Electric Circuits
Operational Amplifiers
DC Motors
Summary
Chapter 7: Fluid and Thermal Systems
Pneumatic Systems
Ideal Gases
Pneumatic Capacitance
Modeling of Pneumatic Systems
Liquid-Level Systems
Hydraulic Capacitance
Hydraulic Resistance
Modeling of Liquid-Level Systems
Thermal Systems
First Law of Thermodynamics
Thermal Capacitance
Thermal Resistance
Modeling of Heat Transfer Systems
System Modeling with Simulink and Simscape
Summary
Chapter 8: System Response
Types of Response
Transient Response and Steady-State Response
Transient Response of First-Order Systems
Free Response of First-Order Systems
Impulse Response of First-Order Systems
Step Response of First-Order Systems
Ramp Response of First-Order Systems
Transient Response of Second-Order Systems
Free Response of Second-Order Systems
Initial Response in MATLAB
Impulse Response of Second-Order Systems
Impulse Response in MATLAB
Step Response of Second-Order Systems
Step Response in MATLAB
Response Analysis Using MATLAB Simulink
Frequency Response
Frequency Response of Stable, Linear Systems
Frequency Response of First-Order Systems
Frequency Response of Second-Order Systems
Bode Diagram
Plotting Bode Diagrams in MATLAB
Bode Diagram of First-Order Systems
Bode Diagram of Second-Order Systems
Solving the State Equation
Formal Solution of the State Equation
Matrix Exponential
Formal Solution in MATLAB
Solution of the State Equation via Laplace Transformation
Solution of the State Equation via State-Transition Matrix
Response of Nonlinear Systems
Numerical Solution of the State-Variable Equations
Fourth-Order Runge–Kutta Method
Response via MATLAB Simulink
Response of the Linearized Model
Summary
Chapter 9: Introduction to Vibrations
Free Vibration
Logarithmic Decrement
Coulomb Damping
Forced Vibration
Half-Power Bandwidth
Rotating Unbalance
Harmonic Base Excitation
Vibration Suppressions
Vibration Isolators
Vibration Absorbers
Modal Analysis
Eigenvalue Problem
Orthogonality of Modes
Response to Initial Excitations
Response to Harmonic Excitations
Vibration Measurement and Analysis
Vibration Measurement
System Identification
Summary
Chapter 10: Introduction to Feedback Control Systems
Basic Concepts and Terminologies
Stability and Performance
Stability of Linear Time-Invariant Systems
Time-Domain Performance Specifications
Frequency-Domain Performance Specifications
Benefits of Feedback Control
Stabilization
Disturbance Rejection
Reference Tracking
Sensitivity to Parameter Variations
Proportional–Integral–Derivative Control
Proportional Control
Proportional–Integral Control
PID Control
Ziegler–Nichols Tuning of PID Controllers
Root Locus
Root Locus of a Basic Feedback System
Analysis Using Root Locus
Control Design Using Root Locus
Bode Plot
Bode Plot of a Basic Feedback System
Analysis Using Bode Plot
Control Design Using Bode Plot
Full-State Feedback
Analysis of State-Space Equations
Control Design for Full-State Feedback
Integration of Simulink and Simscape into Control Design
Control System Simulation Using Simulink
Integration of Simscape into Control System Simulation
نویسنده : www.BartarFile.ir
تاریخ : دو شنبه 6 شهريور 1396
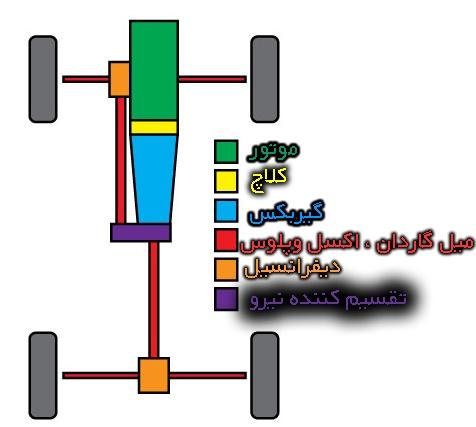
امروزه در بسیاری از فرایندهای صنعتی انتقال قدرت آن هم به صورت كم هزینه و با دقت زیاد مورد نظر است و این مسئله در صنعت خودروسازی هم بسیار مورد بحث و بررسی قرار گرفته است. سیستم انتقال قدرت دو وظیفه را در اتومبیل به عهده دارد: انتقال قدرت از موتور به چرخ های محرك و تغییر مقدار گشتاور تولیدی. گشتاور تولیدی توسط موتور پس از انتقال توسط كلاچ به جعبه دنده می رسد. وظیفه جعبه دنده انتقال دور موتور با نسبت های گوناگون و رساندن آن به خطوط انتقال و میل گاردان در خودروهای دیفرانسیل عقب یا مستقیما از گیربكس به دیفرانسیل در خودروهای دیفرانسیل جلو است. سیستم جعبه دنده انتقال قدرت را می توان به دو گروه جعبه دنده دستی و جعبه دنده اتوماتیك تقسیم بندی نمود. در این جزوه سعی شده تا در مورد سیستم كلاچ، جعبه دنده دستی و اتوماتیك انتقال قدرت و تفاوت های آنها، سیستم جامع انتقال قدرت متغیر CVT، دیفرانسیل و ترنسفر و ... مطالبی عنوان شده و به بحث و بررسی در مورد آنها پرداخته شود...
نویسنده : www.BartarFile.ir
تاریخ : دو شنبه 6 شهريور 1396
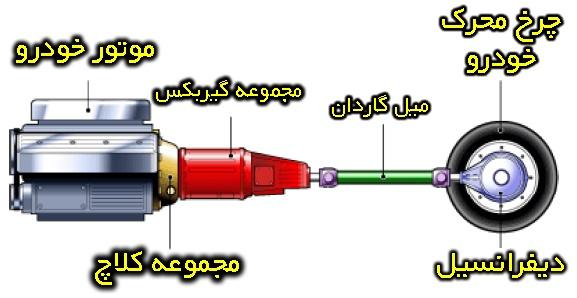
مکانیزم های انتقال قدرت، وظیفه دارند قدرت و گشتاوری که در موتور خودرو تولید شده را به چرخ های خودرو منتقل نمایند. خروجی موتور خودرو یک شفت می باشد (شفت به میله ای گفته می شود که با چرخش خود، قدرت را منتقل می کند). برای اینکه انرژی این شفت به چرخ های خودرو منتقل شود، نیاز به سیستم انتقال قدرت می باشد. در خودرو ها این شفت خروجی از موتور وارد مجموعه ای به اسم کلاچ می شود. در شکل زیر به صورت شماتیک مکانیزم یک خودرو نشان داده شده است. همانطور که مشاهده می کنید، سمت چپ تصویر موتور خودرو قرار دارد که با رنگ خاکستری مشخص شده و شفت خروجی موتور وارد مجموعه ای به اسم کلاچ می شود که وظیفه آن ارتباط و قطع ارتباط موتور و سیستم انتقال قدرت می باشد و پس از کلاچ مجموعه سیستم انتقال قدرت قرار دارد که در این پروژه تک تک اجزاء مهم آن بررسی می شود...
نویسنده : www.BartarFile.ir
تاریخ : دو شنبه 6 شهريور 1396
کتاب طراحی و انتخاب کلاچ ها و ترمزها (Clutches and Brakes, Design and Selection)، کتابی جامع و کاربردی از مباحث طراحی و انتخاب انواع سیستم کلاچ ها و ترمزها می باشد. نکته قابل توجه در این کتاب، وجود مثال های عملی و کاربردی با پاسخ های تشریحی در هر فصل و همچنین دسته بندی فرمول های مهم هر فصل می باشد.