نویسنده : www.BartarFile.ir
تاریخ : دو شنبه 13 ارديبهشت 1400
پیشرفت دانش و تکنولوژی سبب شده است که فرآیندهای تولید، پیچیده و دقیق تر شوند و در نتیجه کنترل آنها سخت تر و پیچیده تر شده است. به طوری که سیستم های کنترل سنتی مانند سیستم های رله ای و سیستم های مبتنی بر مدارهای منطقی قادر نیستند نیازهای صنایع امروزی را برآورده سازند. همچنین در سیستم های کنترل سنتی تغییر دستور العمل های کنترل و یا گسترش آن که لازمه یک صنعت پویاست مستلزم انجام تغییرات زیاد در سخت افزار و صرف هزینه بالاست. در سیستم های کنترل صنعتی، سنسورها با توجه به نیاز صنایع پیشرفته ابداع گردیده و تولید شده اند. سنسورها در سیستم های صنعتی بیشتر عملکرد آن به صورت نرم افزاری تعیین می شود و به این علت یک سنسور یا مجموعه ای از سنسورها را می توان با کاربردهای مختلف منطبق نمود و استفاده کرد...
جزوه آموزشی کنترل صنعتی (Industrial Control)،جزوه ای مفید و کاربردی از درس کنترل صنعتی دانشکده فنی تبریز است. این جزوه مشتمل بر 105 صفحه، با فرمت pdf، به زبان فارسی، همراه با ذکر نکات و فرمول های مهم و کاربردی به ترتیب زیر گردآوری شده است:
نویسنده : www.BartarFile.ir
تاریخ : دو شنبه 13 ارديبهشت 1400
در حال حاضر، بررسی ابعاد مختلف تحقیقات روباتیک توسط متخصصان زمینه های گوناگون انجام می پذیرد. معمولا نمی توان فردی را پیدا کرد که بر کل زمینه رباتیک مسلط باشد. از این رو این رشته به رشتههای فرعی تقسیم شده است. به طور مجرد میتوان رباتیک را به چهار رشته فرعی اعمال مکانیکی، انتقال و حرکت، بینایی کامپیوتر و هوش مصنوعی تقسیم کرد. در این کتاب رشته فرعی علم و مهندسی اعمال مکانیکی معرفی میشود. مبانی این رشته فرعی روباتیکی در چندین زمینه کلاسیک مختلف یافت میشود که اصلی ترین آنها مکانیک، نظریه کنترل و علوم کامپیوتر است.
کتاب مکانیک و کنترل در رباتیک (Mechanics and Control in Robotics)، در این کتاب فصلهای ۱ تا ۸ عنوانهایی از مهندسی مکانیک و ریاضیات، فصلهای ۹ تا ۱۱ موضوعاتی در نظریه کنترل و فصلهای ۱۲ تا ۱۳ مطالبی در علوم کامپیوتری را در بر میگیرند. به علاوه، در این کتاب بر جنبههای محاسباتی مسائل تاکید شده است و در پایان فصلهایی که بیشتر درباره مکانیک بحث کرده اند، بخشی کوتاه ویژه مسائل محاسباتی در نظر گرفته شده است. این کتاب مشتمل بر 570 صفحه، در 13 فصل، به زبان فارسی، همراه با تصاویر به ترتیب زیر گردآوری شده است:
فصل اول: مقدمه
زمینه
مکانیک و کنترل بازوهای مکانیکی ماهر
نمادگذاری
فصل دوم :توصیف ها و تبدیل های فضایی کلی
مقدمه
توصیف ها: مکان ها، جهت گیری ها و چهار چوب ها
نگاشت ها: تغییر دادن توصیف ها از چهارچوبی به چهارچوب دیگر
عملگرها: انتقال ها، دوران ها و تبدیل های کلی
خلاصه تعبیرها
عملیات ریاضی در تبدیل کلی
معادله های تبدیل
مطالبی دیگر درباره نمایش جهت گیری
تبدیل بردارهای آزاد
ملاحظات محاسباتی
فصل سوم: سینماتیک بازوهای مکانیکی ماهر
مقدمه
توصیف رابط
توصیف اتصال رابط
قرارداد برای اتصال چهارچوب ها به رابط ها
سینماتیک بازوهای مکانیکی ماهر
فضای کاراندازی، فضای مفصلی و فضای دکارتی
مثال ها: سینماتیک دو روبات صنعتی
چهارچوب های با نام های استاندارد
ابزار کجاست؟
ملاحظات محاسباتی
فصل چهارم: سینماتیک وارون بازوهای مکانیکی ماهر
مقدمه
حل پذیر بودن
نمادگذاری زیر فضای بازوی مکانیکی ماهر در حالت 6 >n
راه حل جبری در مقابل راه حل هندسی
راه حل جبری از طریق تبدیل به چند جمله ای
روش حل پایپر برای سه محور متقاطع در یک نقطه
مثال هایی از سینماتیک وارون بازوهای مکانیکی ماهر
چهارچوب های استاندارد
استفاده از زیر برنامه SOLVE برای بازو های مکانیکی ماهر
دقت و تکرارپذیری
ملاحظات محاسباتی
فصل پنجم: ژاکوبی ها، سرعت ها و نیروهای استاتیکی
مقدمه
نمادگذاری برای مکان و جهت گیری متغیر با زبان
سرعت خطی و دورانی اجسام صلب
مطالبی بیشتر درباره سرعت زاویه ای
حرکت رابط های روبات
چگونگی اشاعه سرعت از رابطی به رابط دیگر
ژاکوبی ها
حالت های تکین
نیروهای استاتیکی در بازوهای مکانیکی ماهر
ژاکوبی ها در حوزه نیرو
تبدیل دکارتی سرعت ها و نیروهای استاتیکی
فصل ششم: دینامیک بازوهای مکانیکی ماهر
مقدمه
شتاب جسم صلب
توزیع جرم
معادله نیوتن معادله اویلر
محاسبات دینامیکی تکراری نیوتن اویلر
معادله های تکراری و معادله های به شکل بسته
مثالی از معادله های دینامیکی بسته
ساختار معادله های دینامیکی بازوهای مکانیکی ماهر
روش لاگرانژ در به دست آوردن معادله های دینامیکی بازوهای مکانیکی
بدست آوردن معادله های دینامیکی بازوهای مکانیکی در فضای دکارتی
شمول اثرات جسم غیر صلب
شبیه سازی دینامیکی
ملاحظات محاسباتی
فصل هفتم: تولید مسیر
مقدمه
ملاحظات کلی درباره توصیف و تولید مسیر
روش های فضای مفصلی
روش های فضای دکارتی
مشکلات هندسی مسیرهای دکارتی
تولید مسیر در هنگام اجرای برنامه کامپیوتری
توصیف مسیر با زبان برنامه ریزی روبات
طرح ریزی مسیر با استفاده از مدل دینامیکی
طرح ریزی مسیرهای عاری از برخورد
فصل هشتم: مکانیزم بازوهای مکانیکی ماهر
مقدمه
طراحی بر پایه عملیات خواسته شده از روبات
پیکربندی سینماتیکی
معیارهای کمی مشخصات فضای کاری
سازه های زنجیری زاید و بسته
روش های کارانداز
سختی و تغییر شکل خمشی
حس مکان
حس نیرو
فصل نهم: کنترل خطی بازوهای مکانیکی ماهر
مقدمه
کنترل مدار بسته و پس خوراند (فید بک)
سیستم های خطی درجه دوم
کنترل سیستم های درجه دوم
تقسیم قانون کنترل
کنترل تعقیب مسیر
دفع اغتشاش
کنترل زمانی پیوسته و ناپیوسته (منقطع)
مدل سازی و کنترل یک مفصل تنها
ساختمان کنترل کننده یک روبات صنعتی
فصل دهم: کنترل غیر خطی بازوهای مکانیکی ماهر
مقدمه
سیستم های غیر خطی و متغیر با زمان
سیستم های کنترل چند ورودی چند خروجی
کنترل بازوهای مکانیکی ماهر
ملاحظات عملی
سیستم های کنترل روبات های صنعتی امروزی
تحلیل پایداری لیاپونوف
سیستم های کنترل مبتنی بر مختصات دکارتی
کنترل تطبیقی
فصل یازدهم: کنترل نیرو در بازوهای مکانیکی ماهر
مقدمه
کاربرد روبات های صنعتی در عملیات مونتاژ
چهارچوب اعمال کنترل در عملیات مقید شده جزئی
مسئله کنترل ترکیبی مکان نیرو
کنترل نیروی سیستم جرم فنر
روش های کنترل ترکیبی مکان نیرو
روش های کنترل روبات های صنعتی کنونی
فصل دوازدهم: سیستم ها و زبان های برنامه ریزی روبات
نویسنده : www.BartarFile.ir
تاریخ : چهار شنبه 8 ارديبهشت 1400
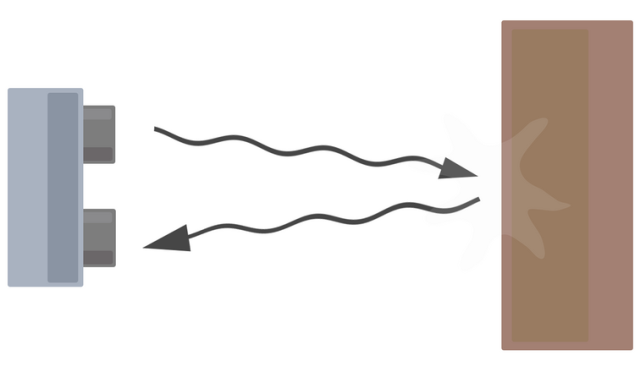
تاکنون پروژه های زیادی با موضوع فاصله سنج اولتراسونیک با میکروکنترلر AVR اجرا شده اند که برنامه نویسی اغلب آنها به زبان اسمبلی و بیسیک بوده که در نرم افزار Bascom نوشته شده اند. اما در این پروژه قصد داریم تا برنامه نویسی را به زبان C و در نرم افزار Codevision انجام دهیم. مدار مورد استفاده در این پروژه همان مدار استفاده شده در پروژه فاصله سنج کتاب پروژه های علمی با میکروکنترلرهای AVR می باشد.همان طور که می دانیم هر شخص طراح می بایست دارای سه خصوصیت باشد:
دایره اطلاعاتی بالایی داشته باشد، یعنی علم به روز و ابزارات جدید را خوب بشناسد.
شناخت خوبی از سخت افزار داشته باشد (طراحی PCB، شناخت سنسور، میکروکنترلر و ...)
از یک زبان برنامه نویسی آگاهی کامل داشته باشد (زبان C، پاسکال، اسمبلی و ...)
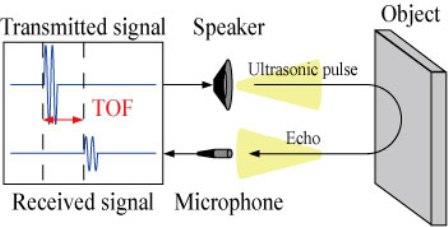
دو مورد اول به مراتب از مورد سوم پیچیده تر می باشند و هرکسی توانایی طراحی سخت افزار و مدار آنالوگ را ندارد. با این حال برنامه نویسی اصولی و صحیح (برنامه نویسی ماژولا) نیز قواعد خاص خود را دارد. در این پروژه سعی شده است تا به اختصار به هر بخش پرداخته شود. در پروژه قصد داریم دستگاهی را طراحی و پیاده سازی نماییم که بتواند فاصله اجسام مقابل، تا خود را بدون تماس دستگاه با آن اجسام اندازه بگیرد. برای این کار به یک جفت سنسور فرستنده و گیرنده مافوق صوت نیاز داریم. سنسور فرستنده اولتراسنیک امواج مافوق صوت را تولید می کند و سنسور گیرنده اولتراسنیک امواج باز تابیده شده از اجسام را دریافت می نماید. با اندازه گیری زمان رفت و برگشت امواج صوتی و با دانستن سرعت صوت، مسافت طی شده توسط صوت و هم چنین فاصله دستگاه تا جسم مورد نظر به راحتی محاسبه خواهد شد. از میکروکنترلر ATmega8 در این پروژه استفاده شده است که چند وظیفه اساسی دارد:
تولید سیگنال پالس با فرکانس 40khz که در مدار فرستنده مورد استفاده قرار می گیرد.
اندازه گیری زمان رفت و برگشت امواج صوتی بازتابیده شده از اجسام
اندازه گیری دما
محاسبه فاصله و نمایش آن بر روی نمایشگر
در طی مراحل طراحی با مشکلاتی روبرو هستیم که مهمترین آنها متغیر بودن سرعت صوت در دماهای مختلف و تضعیف سیگنال دریافتی توسط سنسور گیرنده است که در ادامه به رفع آنها پرداخته شده است...
نویسنده : www.BartarFile.ir
تاریخ : دو شنبه 6 ارديبهشت 1400
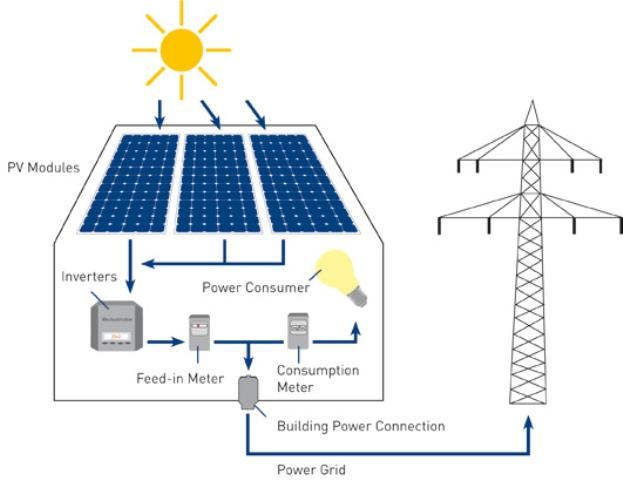
سلول های فتوولتانی یا خورشیدی، کریستال های ظریفی هستند که از لایه های بسیار نازکی از مواد نیمه هادی خاص ساخته شده اند. خوشبختانه مهمترین عنصری که در ساخت این سلول ها به کار می رود، دومین عنصر فراوان پوسته زمین، یعنی سیلیکون است. سلول های اشاره شده، برای تولید برق، به تابش نور خورشید نیاز دارند و به این لحاظ، کارآیی و بازدهی آنها در مناطقی از دنیا که با تابش های شدیدتر و طولانی مدت مواجه اند، بیشتر است. لازم به ذکر است که انرژی رایگان و لایزال دریافتی از خورشید در کره زمین، بالغ بر ۹۱۰۱۱۱ برابر مصرف سوخت های هسته ای و فسیلی فعلی بوده و از این لحاظ هیچ گونه کمبودی احساس نمی شود. به سه دلیل عمده، بهره گیری از انرژی خورشید در تولید برق، در هزاره سوم، به صورت جدی تری در دستور کار بسیاری از کشورهای پیشرفته صنعتی قرار گرفته است. پیش از همه، این فناوری، فاقد هرگونه آلودگی بوده و هیچ پیامد زیست محیطی خاصی را به دنبال ندارد. دوم، سلول های خورشیدی فاقد قطعات و ساز و کارهای مکانیکی اند و به این لحاظ، عملکرد آنها با حداقل فرسایش و استهلاک همراه بوده و نیازی به تعویض و سرویس های منظم و دوره ای ندارند و بالاخره، ذخایر سوخت های فسیلی جهان به سرعت رو به اتمام است و براساس گزارش های مختلف، در یک قرن آینده و به تدریج به اتمام می رسند. البته برق تولیدی یک سلول خورشیدی واحد، جزئی و مختصر بوده و در نگاه اول به نظر می رسد که توان مزبور، فاقد کارایی و تأثیر قابل ملاحظه است و نهایتاً از آن می توان برای فعالسازی وسایل کم مصرفی همچون یک ماشین حساب بهره گرفت. هر چند که این فکر، تصور نادرستی بوده و با اتصال تعدادی از این سلول ها به یکدیگر به راحتی می توان به انرژی مورد نظر دست یافت و تنها محدودیت پیشرو، بعد از بالا رفتن قیمت، سنگینی وزن و افزایش فضای مورد نیاز برای جا دادن آنها می باشد. با اصلاح فناوری ساخت و ابداع روش های جدیدتر و سیر صعودی میزان تولید و همه گیر شدن استفاده از پنل های خورشیدی در کارهای خانگی، تجاری و صنعتی، طبیعتاً قیمت آنها هم کاهش یافته و این روند نزولی دنبال خواهد شد...
پروژه توليد برق از سلول های خورشیدیمشتمل بر 71 صفحه، تایپ شده، به همراه تصاویر، دیاگرام و جدول، روابط و فرمول های اصلی، با فرمت pdf جهت دانلود قرار داده شده و فصل بندی پروژه به ترتیب زیر می باشد:
نویسنده : www.BartarFile.ir
تاریخ : دو شنبه 2 ارديبهشت 1400
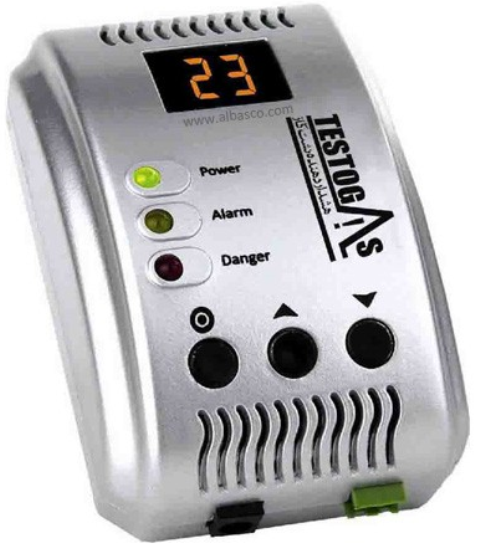
موضوع پروژه در رابطه با هشدار وجود گاز در محیط از طریق ارسال پیام کوتاه می باشد. در این پروژه با استفاده از یک سنسور گاز (که می تواند انواع گازهای متعدد از جمله منواکسید کربن، گاز شهری، آمونیاک و ... را تشخیص دهد) استفاده می شود که می تواند بسته به نوع کار، به صورت آنالوگ و یا دیجیتال باشد. این سنسور وجود گاز در محیط را تشخیص داده و بسته به مقدار گاز، ولتاژی ایجاد می کند. همواره می توان با استفاده از یک کنترلر ولتاژ آن را اندازه گرفت و در صورتی که از حد معینی تجاوز کرد عمل مشخص شده را انجام دهد. در این پروژه همچنین می توان با ارسال یک متن کلیدی خاص از شماره مورد نظر عمل خاصی را انجام داد مثلا قطع شیر اصلی گاز و ... برای ارتباط با شبکه های جی اس ام ماژول های متفاوتی وجود دارند که بسته به نوع کار و امکانات موجود می توان از آنها استفاده کرد. ماژول استفاده شده در این پروژه SIM 908 ساخت شرکت SIMCOM می باشد که دارای امکانات متعدد و جالبی می باشد که بسته به شرایط می توان از آنها استفاده نمود. از جمله این امکانات می توان به قابلیت های ارسال و دریافت پیام کوتاه، امکان ایجاد تماس تلفنی، امکان استفاده از سیستم موقعیت یاب جهانی و ایجاد ارتباط از طریق اینترنت و .... را نام برد. سایر امکانات در بخش معرفی ماژول بیان شده است. در این پروژه همچنین از یک میکرو کنترلر AVR MEGA 32A ساخت شرکت ATMEL جهت ارتباط با سنسور گاز و ماژول، استفاده شده است و زبان برنامه نویسی و کامپایلر مورد استفاده در این پروژه به ترتیب C و Code vision می باشد...
پروژه طراحی سیستم هشدار دهنده گازهای خطرناک بوسیله پیامکمشتمل بر 6 فصل، 127 صفحه، تایپ شده، به همراه تصاویر، دیاگرام و جدول، روابط و فرمول های اصلی، با فرمت pdf جهت دانلود قرار داده شده و فصل بندی پروژه به ترتیب زیر می باشد:
فصل 1: مقدمه و معرفی پروژه
مقدمه
مشخصات فرکانسی و نواحی شبکه جی اس ام
مفاهیم شبکه سلولی
جابجایی سلولی
مشخصات سیم کارت
پروسه تصدیق هویت
معرفی کننده موقعیت محلی
موبایل
آنتن
موضوع پروژه
اهمیت و اهداف پروژه
فصل 2: آموزش طراحی PCB و پورت سریال
مقدمه
طراحی مدار چاپی
معرفی نرم افزار Altium
تنظیمات مربوط به شماتیک
طراحی یک مدار در فضای نرم افزار
قرار دادن المان ها و کتابخانه ها
سیم کشی مدار
ایجاد سند PCB
تعیین اندازه برد
انتقال اطلاعات از سند شماتیک به سند PCB
مسیرکشی بین قطعات در سند PCB
پورت سریال و پروتکل RS232
قالب اطلاعات ارسالی
سطح سیگنال RS232
آی سی MAX 232
کانتکتور D9
فصل 3: معرفی تجهیزات پروژه
تجهیزات مورد استفاده در پروژه
معرفی ماژول SIM 908
مشخصات ماژول SIM908
قابلیت ها و کاربرد های ماژول SIM 908
معرفی پایه های ماژول SIM 908
مراحل راه اندازی ماژول
سنسور های گاز سری MQ
ویژگی سنسور های گاز سری MQ
انواع سنسور های گاز سری MQ
سنسور گاز 9MQ
مشخصات سنسور گاز 9MQ
معرفی میکرو کنترلر AT MAGA 32A
مشخصات میکرو کنترلر AT MAGA 32A
رله الکترونیکی پیچ پایه
عملکرد رله
پایه های رله
فصل 4: معرفی و تست دستورات کاری ماژول
دستورات لازم جهت کار با ماژول
دستورات مرتبط با پیام کوتاه
دریافت و ارسال اطلاعات ازطریق کامپیوتر
معرفی و تنظیم نرم افزارHyper Terminal
تست دستورات کاری ماژول در نرم افزار
فصل 5: راه انداری و انجام پروژه
مقدمه
PCB های پروژه
PCB راه اندازی اولیه ماژول
PCB جهت برقراری اتصال تمامی تجهیزات مورد نیاز پروژه
نویسنده : www.BartarFile.ir
تاریخ : شنبه 29 فروردين 1400
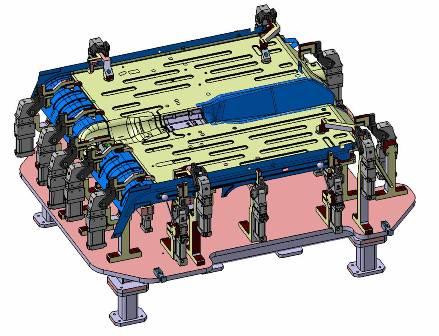
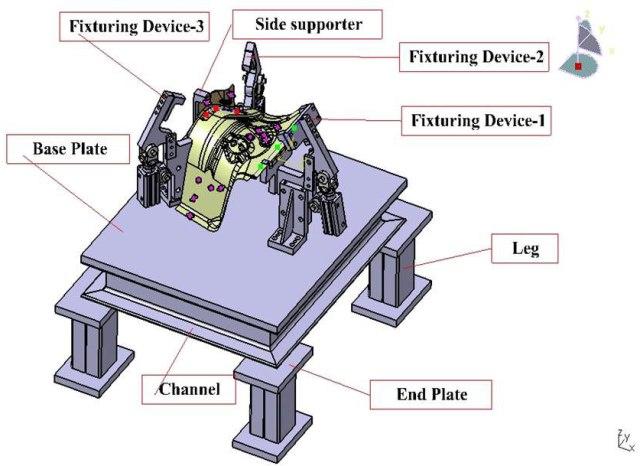
جیگ و فیکسچرها ابزارهای قطعه گیر در تولید هستند که برای ساخت دقیق قطعات همسان به کار می روند. ارتباط صحیح و چینش بین ابزار برش یا ابزارهای دیگر و قطعه کار باید حفظ شود. جیگ و فیکسچر برای نگاه داشتن، پشتیبانی و تعیین محل هر قطعه برای سوراخکاری یا ماشین کاری با محدودیت های تعیین شده است. ارتباط نزدیک جیگ و فیکسچر آنقدر نزدیک است که گاها جابجا استفاده می شود. تفاوت این دو در نحوه هدایت ابزار به قطعه کار است...
کتاب طراحی جیک و فیکسچر (Jig and Fixture Design)، کتابی مفید و کاربردی از آموزش مباحث طراحی قید و بند است، که مشتمل بر 384 صفحه، در 4 بخش و 21 فصل، به زبان انگلیسی، همراه با فرمول های اساسی، تصاویر و روابط مهم به ترتیب زیر گردآوری شده است:
SECTION I: BASIC TYPES AND FUNCTIONS OF JIGS AND FIXTURES
UNIT 1: PURPOSE OF TOOL DESIGN
UNIT 2: TYPES AND FUNCTIONS OF JIGS AND FIXTURES
UNIT 3: SUPPORTING AND LOCATING PRINCIPLES
UNIT 4: CLAMPING AND WORK HOLDING PRINCIPLES
UNIT 5: BASIC CONSTRUCTION PRINCIPLES
SECTION II: CONSIDERATIONS OF DESIGN ECONOMICS
UNIT 6: DESIGN ECONOMICS
UNIT 7: DEVELOPING THE INITIAL DESIGN
UNIT 8: TOOL DRAWINGS
SECTION III: DESIGNING AND CONSTRUCTING JIGS AND FIXTURES
UNIT 9: TEMPLATE JIGS
UNIT 10: VISE-HELD AND PLATE FIXTURES
UNIT 11: PLATE JIGS
UNIT 12: ANGLE-PLATE JIGS AND FIXTURES
UNIT 13: CHANNEL AND BOX JIGS
UNIT 14: VISE-JAW JIGS AND FIXTURES
SECTION IV: SPECIALIZED WORK HOLDING TOPICS
UNIT 15: POWER WORK HOLDING
UNIT 16: MODULAR WORK HOLDING
UNIT 17: WELDING AND INSPECTION TOOLING
UNIT 18: LOW-COST JIGS AND FIXTURES
UNIT 19: TOOLING FOR NUMERICALLY CONTROLLED MACHINES
نویسنده : www.BartarFile.ir
تاریخ : شنبه 25 فروردين 1400
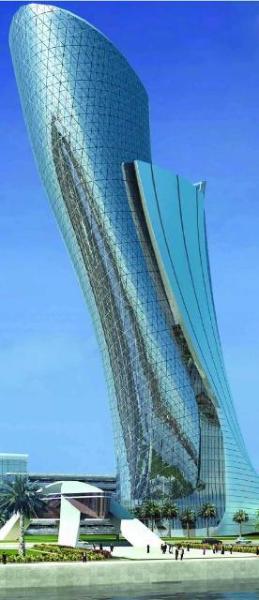
در صورتیکه ارتفاع ساختمان از یک حد معینی بیشتر شود و جزو ساختمان های بلند قرار گیرد، سیستم های سازه ای متداول جوابگوی نیازهای ما نخواهند بود زیرا در ساختمان های بلند، صلیب و پایداری ضوابط مهم تری را نسبت به مقاومت (مشخصه اصلی سازه های کوتاه) بیان می کنند. جهت پاسخ گویی به نیازهای فوق، سیستم جدیدی تحت عنوان سیستم لوله ای ابداع شده است. این سیستم دارای چنان قابلیتی است که در بیشتر حالات مقدار مصالح سازه ای مورد استفاده در این سیستم به نسبت ساختمانی که در آن از سیستم های قابی متداول استفاده شده باشد به نصف تقلیل پیدا می کند. از جمله مزایای دیگر این سیستم، انعطاف پذیری زیاد آنها در تقسیم بندی فضاهای داخلی و کاهش تغییر مکان جانبی سازه می باشد.
در این سیستم ها به علت انعطاف پذیری تیرهای پیرامونی در قاب، تغییر شکل های ناشی از برش ایجاد می شود که این پدیده، تاخیر برشی نامیده می شود و سبب می گردد که کارایی سیستم های لوله ای تا اندازه ای کاهش یابد در صورتی که تاخیر برشی به حداقل برسد می توان انتظار داشت که ساختمان بلند لوله ای همانند یک تیر طره با مقطع صندوقه ای عمل نماید. در اینپروژه سعی شده است علل و نحوه ایجاد پدیده تاخیر برشی در ساختمان های بلند لوله ای مورد بررسی و تحقیق قرار گرفته و روش هایی برای کاهش این پدیده ارائه گردد. یکی از روش ها، استفاده از مهاربندها می باشد که بحث اینپروژه بیشتر بر روی آن متمرکز گشته است. برای این منظور تاثیر تعداد و محل قرار گیری مهاربندها بر روی موضوعاتی از قبیل تاخیر برش، تغییر مکان جانبی و نیروهای دینامیکی وارد بر سازه مورد بررسی قرار گرفته و نتایج بیانگر این مطلب است که استفاده از مهاربندها بصورت زیگزاک تاثیر بیشتری در جهت کاهش تاخیر برش خواهد داشت...
نویسنده : www.BartarFile.ir
تاریخ : شنبه 24 فروردين 1400
بر خلاف سیستم انتقال قدرت اتوماتیک، در سیستم انتقال قدرت با قابلیت تغییر پیوسته، جعبه دنده ای با تعداد مشخص چرخ دنده وجود ندارد، یعنی در CVT چرخ دنده های دندانه دار درگیر با هم وجود ندارند. رایج ترین نوع CVT بر اساس سیستم پولی کار می کند که اجازه ی بینهایت تغییر بین بالاترین و پایین ترین دنده بدون گسستگی را می دهد. اگر از اینکه چرا درباره ی CVT هم از واژه دنده استفاده می شود تعجب می کنید به خاطر بیاورید که منظور از دنده نسبت سرعت موتور به سرعت محور چرخ ها می باشد.
اگرچه CVT این نسبت را بدون استفاده از چرخ دنده های سیاره ای انجام می دهد اما باز هم از واژه دنده برای CVT استفاده می شود. بیشتر CVT ها فقط سه جزء اساسی دارند:
یک تسمه محکم فلزی یا لاستیکی
یک پولی متغییر محرک (ورودی)
یک پولی خروجی
به علاوه CVT ها انواع مختلفی از ریزپردازنده ها و حسگر ها را دارا می باشند، اما سه جزءی که در بالا توضیح داده شده اند اجزای اصلی اند که به این سیستم اجازه ی کار می دهند. پولی های با شعاع متغیر قلب CVT هستند، هر پولی از دو مخروط با زاویه راس ٢٠ درجه که رو در روی یکدیگر قرار دارند تشکیل شده است، تسمه ای در شیار بین دو مخروط قرار دارد، در صورت لاستیکی بودن تسمه ها از تسمه های V شکل استفاده می شود، تسمه های V شکل از آنجا نام خود را می گیرند که سطح مقطع V شکل دارند که اصطکاک تسمه با پولی را افزایش می دهد.
پروژه سیستم انتقال قدرت پیوسته (CVT)،در 24 اسلاید، با فرمت powerpoint و 9 صفحه با فرمت word به زبان فارسی، همراه با 5 فایل ویدیویی که نحوه کار و تاثیر سیستم انتقال قدرت CVT را نمایش می دهد و تصاویر و ذکر نکات مهم سیستم cvt به ترتیب زیر گردآوری شده است:
نویسنده : www.BartarFile.ir
تاریخ : شنبه 23 فروردين 1400
دفتر کلاسی هوشمند، برنامه ای است که در راستای هوشمندسازی مدارس کشور عزیزمان تهیه گردیده است. این برنامه تحت نرم افزار اکسل 2007 تهیه شده است و در اکسل 2010 نیز قابل اجراست. دفتر کلاسی هوشمند جایگزین مناسبی برای دفاتر کلاسی است که اطلاعات آن بصورت دستی وارد می شد. زمان بندی تدریس، جمع آوری اطلاعات دانش آموز، وضعیت درسی دانش آموز در درس مورد نظر، تعداد غیبت، نمرات کتبی و شفاهی، موارد انضباطی در کلاس، گروه بندی کلاس، نمودار پیشرفت دانش آموزان، ارتباط با اولیاء، رتبه بندی، محاسبه نمره مستمر و غیره از قابلیت های این برنامه است که همه ی آنها در یک فایل اکسل ذخیره می شود. نکاتی در مورد کاربرگ های (Sheet) دفتر کلاسی هوشمند:
این کاربرگ ها در طول سال تحصیلی و برای هر دو نیمسال استفاده می شوند.
کاربرگ های بنفش مربوط به نیمسال اول و کاربرگ های آبی مربوط به نیمسال دوم سال تحصیلی می باشند.
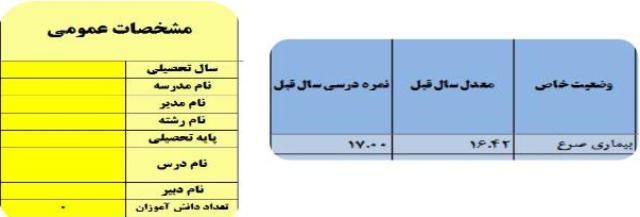
کاربرگ پیش اطلاعات:
کافی است یک بار مشخصات دانش آموزان تایپ شود تا در بقیه کاربرگ ها؛ نام، نام خانوادگی و کد دانش آموزی بصورت خودکار ایجاد شود. در ستون وضعیت خاص، مشکل خانوادگی دانش آموز مثل جدایی والدین، بیماری خاص یکی از اعضای خانواده یا خود دانش آموز و ... درج می شود. معدل و نمره سال قبل درس مورد نظر (جهت اطلاع از سطح هر دانش آموز) نیز در قسمت مربوطه تایپ می گردد. در قسمت زرد رنگ مشخصات خواسته شده باید وارد گردد که تعداد دانش آموزان، پس از وارد کردن اسامی دانش آموزان، بصورت خودکار در قسمت مربوطه محاسبه می گردد.
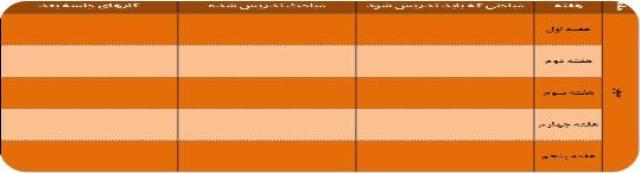
هر ماه به 5 هفته تقسیم شده است (برخی اوقات ماه های سال دارای 5 هفته می باشند). مباحث کتاب، توسط معلم و بصورت هفتگی در ستون اول، تقسیم بندی می شوند. در ستون دوم، موارد تدریس شده هر هفته وارد می گردد و در ستون سوم، فعالیت های جلسه بعد از قبیل تحقیق، پرسش کلاسی، امتحان و غیره جهت یادآوری نوشته می شود.
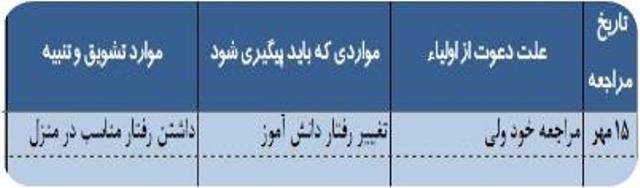
کاربرگ مراجعه اولیاء:
دفعات مراجعه والدین و علت مراجعه اولیاء (دعوت توسط مدرسه، معلم و یا احساس مسئولیت خود والدین) معین می گردد. در این کاربرگ میزان تعامل خانواده با معلم و مدرسه مشخص خواهد شد.
روزهای مربوط به تدریس در هر ماه، در سطر کِرِم رنگ توسط معلم تایپ می شود.
توجه: از هر نماد، حرف و یا عدد برای نشان دادن غیبت می توان استفاده کرد. بهتر است برای درج غیبت از علامت ستاره * استفاده شود و از علامت های + = - استفاده نگردد. اگر غیبت دانش آموزی به عدد 3 برسد، ستون مجموع غیبت آن به رنگ قرمز در می آید.
برتر فایل یک سایت مرجع با هدف انتشار تحقیق، مقاله، پایان نامه، پاورپوینت، جزوه، کتاب و همچنین فایل های آموزشی از نرم افزار پیشرفته CATIA در زمینه رشته مهندسی مکانیک است که به منظور دسترسی راحت تر، سریع تر و ارزان تر شما دانشجویان و پژوهشگران به تحقیقات مد نظرتان تاسیس شده است.



















 آمار
وبلاگ:
آمار
وبلاگ: