google-site-verification=5hWSVQ193mCqPdre_SIGMP_ZjIHTvMflXnJnBO_Q35o
مقاله با عنوان: بررسی کوپلینگ های یونیورسال و شبیه سازی مکانیزم آنها به کمک نرم افزار Working Model
نویسنده : www.BartarFile.ir
تاریخ : دو شنبه 6 شهريور 1396
امروزه برای انتقال قدرت از یک شافت به شافت دیگر، کوپلینگ ها به کثرت مورد استفاده قرار می گیرند. در این رابطه، بررسی مکانیزم حرکت آنها و شبیه سازی آن از اهمیت ویژه ای برخوردار است. یکی از انواع کوپلینگ هایی که کاربردهای فراوانی دارد، کوپلینگ یونیورسال می باشد. در این مقاله ابتدا مقداری راجع به این نوع کوپلینگ ها و تئوری حرکت آنها صحبت می شود، سپس به کمک نرم افزار Working Model مکانیزم حرکت آنها شبیه سازی گردیده و نتایج بدست آمده مورد تجزیه و تحلیل قرار می گیرد...
مقاله بررسی کوپلینگ های یونیورسال و شبیه سازی مکانیزم آنها به کمک نرم افزار Working Model، مشتمل بر 9 صفحه، به زبان فارسی، تایپ شده، به همراه تصاویر، دیاگرام، فرمول ها و روابط ریاضی با فرمت pdf، به ترتیب زیر گردآوری شده است:
نویسنده : www.BartarFile.ir
تاریخ : دو شنبه 6 شهريور 1396
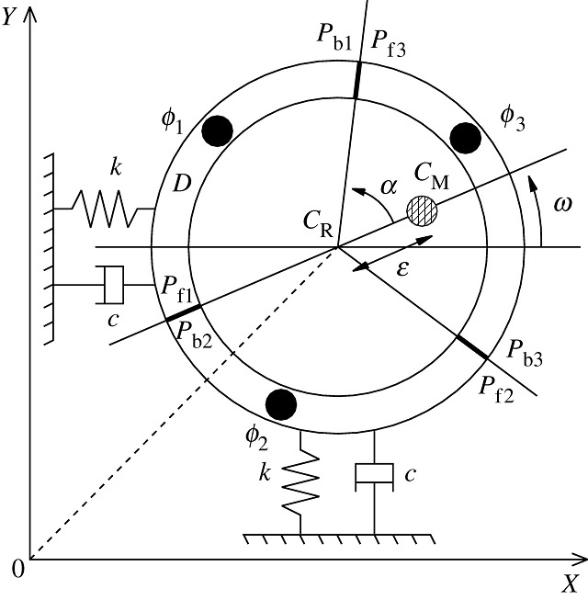
در این مقاله با انتخاب یک روتور صفحه ای جفکات به عنوان ماشین دوار، معادلات حاکم بر حرکت روتور و پاسخ سیستم دوار به نابالانسی و خم استاتیکی موجود در آن (شامل دامنه و فاز پاسخ) استنتاج می شوند. در ادامه با بکارگیری یک بالانسر رینگ و گلوله به عنوان اتوبالانسر انفعالی بر روی ماشین دوار، به استنتاج معادلات حرکت، تحلیل پایداری و بدست آوردن پاسخ های زمانی سیستم پرداخته می شود. تحلیل پایداری سیستم حول وضعیت های تعادل آن برای اتوبالانسری با یک و دو گلوله، بر اساس معیار روت هاویتز انجام شده است. پاسخ های زمانی سیستم در جهت تایید تحلیل پایداری انجام گرفته، ارائه شده است...
مقاله بالانس اتوماتیک ماشین های دوار با استفاده از یک سیستم بالانس کننده انفعالی و تعیین محدوده های پایدار آن، مشتمل بر 9 صفحه، به زبان فارسی، تایپ شده، به همراه تصاویر، دیاگرام، فرمول ها و روابط ریاضی با فرمت pdf، به ترتیب زیر گردآوری شده است:
نویسنده : www.BartarFile.ir
تاریخ : دو شنبه 6 شهريور 1396
به طور کلی ریخته گری دقیق به فرآیندی گفته می شود که در آن اطراف مدل مومی یا پلاستیکی (مدل از بین رفتنی) را با انواع دوغاب سرامیکی پوشش داده، سپس با ذوب و تخلیه موم محفظه قالب ایجاد شده و پس از پخت قالب سرامیکی در آن ذوب ریزی می کنند. بطور کلی دو روش مجزا برای ساختن قالب ریخته گری دقیق وجود دارد:
روش اول: ریخته گری دقیق به روش قالب توپر (solid)
دراین روش مدل را در استوانه ای فولادی قرار داده و داخل آن را با دوغاب سرامیکی پر می کنند، سپس بعد از چند ساعت دوغاب خودگیر، شده و در این هنگام موم را با حرارت خارج کرده و بعد از پخت قالب عملیات بار ریزی را انجام می دهند. این روش ریخته گری امروزه کمتر در تولید قطعات صنعتی به کار می رود و بیشتر در تولید قطعات تزیینی و جواهر سازی و دندانسازی به کار گرفته می شود.
روش دوم: ریخته گری دقیق به روش پوسته ای سرامیکی (shell)
در این روش مدل مومی را در دوغاب سرامیکی غوطه ور می کنند سپس ماسه هایی با دانه بندی گوناگون روی مدل می پاشند که با تکرار این فرآیند، یک لایه سرامیکی اطراف مدل ایجاد خواهد شد. سپس با کمک حرارت دادن، موم را خارج کرده و پس از پخت قالب در آن بار ریزی می شود. این روش امروزه در تولید قطعات صنعتی به طور معمول استفاده شده و در تولید بعضی از قطعات بهترین روش ریخته گری محسوب می شود...
نویسنده : www.BartarFile.ir
تاریخ : دو شنبه 6 شهريور 1396
کتاب حاضر که مطالب آن تلفیقی از ترجمه و تالیف می باشد، در خصوص مکانیزم ها و روش های تخریب آلیاژهای مهندسی به کار گرفته شده در صنایع بحث می کند. امروزه به منظور تداوم در تولید صنعتی، لازم است که از عملکرد دستگاه ها و تجهیزات تولید کننده مطمئن باشیم. برای رسیدن به این اطمینان بایستی کلیه عواملی که سبب تخریب و یا از کار افتادن تجهیزات و دستگاه های صنعتی می شوند را شناسایی و ضمن مطالعه دقیق آنها، برنامه ریزی کاملی برای عدم بروز این عوامل را به اجرا گذاشت. در این کتاب تقریبا تمامی روش ها و مکانیزم های مختلفی که موجب تخریب و یا اختلال در کار دستگاه ها و تجهیزات صنعتی می شوند، مورد بررسی دقیق قرار گرفته است. هدف اصلی این کتاب، آشنا کردن هر چه بیشتر کارشناسان و تکنسین های صنایع مختلف به خصوص صنایع پالایش نفت، گاز و پتروشیمی با مکانیزم هایی است که سبب تخریب، انهدام و یا از کار افتادن تجهیزات واحدهای صنعتی همچون لوله ها، مخازن ذخیره، مخازن تحت فشار، مبدل های حرارتی، رآکتورها و ... می شوند. این کتاب برای مهندسین، تکنسین ها، دانشجویان رشته های بازرسی فنی و ایمنی، متالورژی صنعتی، مکانیک، شیمی و همچنین کلیه افرادی که تمایل به مطالعه مکانیزم های تخریب آلیاژهای مهندسی دارند، می تواند مناسب و مفید باشد. از نکات بارز این کتاب آن است که تمامی 62 مکانیزم مختلف تخریب شناخته شده، شامل آسیب های مکانیکی، شیمیایی، متالورژیکی و حتی ترکیب آنها، به صورت مفصل در پنج فصل تشریح شده است و مثال های متنوعی از محل بروز این مکانیزم ها ارائه شده است...
کتاب مکانیزم های تخریب آلیاژهای مهندسی در صنایع نفت، گاز و پتروشیمی، مشتمل بر 7 فصل، 417 صفحه، به زبان فارسی، همراه با تصاویر، فرمول ها و جداول مهم، با فرمت pdf، به ترتیب زیر گردآوری شده است:
فصل 1: مکانیزم های تخریب های مکانیکی و متالورژیکی
پدیده گرافیته شدن
پدیده نرم شدن (کروی شدن فاز سمانتیت)
پدیده تردی تمپر
پدیده کرنش سختی
پدیده تردی 885F (475 C)
پدیده تردی فاز سیگما
پدیده شکست ترد
پدیده خزش و تنش پارگی
پدیده خستگی حرارتی
پدیده گرم شدن بیش از حد کوتاه مدت و پدیده تنش پارگی
پدیده تشکیل لایه بخار در بویلرها
پدیده بروز ترک های ناشی از جوشکاری فلزات غیر همجنس
پدیده شوک حرارتی
پدیده سایش و خوردگی سایشی
پدیده حبابی شده (کاویتاسیون)
پدیده خستگی مکانیکی
پدیده خستگی ناشی از ارتعاشات
پدیده کاهش خواص مواد نسوز
پدیده بروز ترک های ناشی از گرم کردن مجدد
پدیده تشکیل هیدراید تیتانیوم
فصل 2: مکانیزم های کاهش ضخامت موضعی و یکنواخت آلیاژها
خوردگی گالوانیکی
خوردگی اتمسفری
خوردگی زیر عایق های حرارتی
خوردگی ناشی از آب های خنک کننده
خوردگی ناشی از آب تغلیظ شده بویلرها
خوردگی ناشی از CO2
خوردگی ناشی از نقطه شبنمی جریان گازهای خروجی از دودکش ها
خوردگی میکروبی
خوردگی در خاک ها
خوردگی سود سوزآور (کاستیک)
پدیده جدایش عناصر آلیاژی
خوردگی گرافیتی در چدن ها
فصل 3: مکانیزم تخریب در دمای بالا
پدیده اکسیداسیون
پدیده سولفیداسیون
پدیده کربوره شدن
پدیده دکربوره شده
پدیده غبار شدن فلز
پدیده خوردگی ناشی از خاکستر سوخت ها
پدیده نیتروژه شدن
پدیده خسارت هیدروژنی دمای بالا
فصل 4: مکانیزم های ترک دار شدن آلیاژها بر اثر عوامل محیطی
خوردگی تنشی ناشی از کلراید
خوردگی تنشی ناشی از سود سوزآور
خوردگی تنشی ناشی از آمونیاک
خوردگی تنشی ناشی از اسید پلی تیونیک
خوردگی تنشی ناشی از آمین
خوردگی تنشی ناشی از کربنات ها
پدیده خوردگی خستگی
تردی ناشی از فلزات مذاب
پدیده تردی هیدروژنی
ترک دار شدن ناشی از هیدروژن در محیط HF
خسارت ناشی از H2S مرطوب
فصل 5: مکانیزم های خوردگی عمومی آلیاژهای مهندسی در صنعت پالایش
خوردگی ناشی از آمین
خوردگی تنشی ناشی از بی سولفاید آمونیوم
خوردگی ناشی از کلراید آمونیوم
خوردگی ناشی از اسید کلریدریک
خوردگی دمای بالای H2/H2S
خوردگی ناشی از اسید فلوئوریدریک
خوردگی ناشی از اسید نفتنیک
خوردگی ناشی از اسید کربونیک (فنل)
خوردگی ناشی از اسید فسفریک
خوردگی ناشی از آب های ترش (آب های اسیدی)
خوردگی ناشی از اسید سولفوریک
فصل 6:محل بروز انواع مکانیزم های تخریب در واحدهای مختلف پالایشگاه های نفت و گاز
مکانیزم های تخریب و محل بروز آنها در واحد تقطیر نفت خام
مکانیزم های تخریب و محل بروز آنها در واحدهای هیدروپروسس
مکانیزم های تخریب و محل بروز آنها در واحد تبدیل کاتالیستی با بستر ثابت
مکانیزم های تخریب و محل بروز آنها در واحد کراکینگ کاتالیستی با بستر سیال
مکانیزم های تخریب و محل بروز آنها در واحد تبدیل کاتالیستی CCR
مکانیزم های تخریب و محل بروز آنها در واحد بازیابی فرآورده های سبک خروجی از واحد FCC
مکانیزم های تخریب و محل بروز آنها در واحد پیوند مولکولی با کاتالیزور اسید سولفوریک
مکانیزم های تخریب و محل بروز آنها در واحد پیوند مولکولی با کاتالیزور اسید فلوئوریدریک
مکانیزم های تخریب و محل بروز آنها در واحد ایزومریزاسیون بوتان
مکانیزم های تخریب و محل بروز آنها در واحد تولید هیدروژن
مکانیزم های تخریب و محل بروز آنها در واحد آمین
مکانیزم های تخریب و محل بروز آنها در واحد تصفیه کننده آب های ترش
مکانیزم های تخریب و محل بروز آنها در واحد بازیابی گوگرد از H2S
مکانیزم های تخریب و محل بروز آنها در واحد تولید کک
فصل 7: طراحی برنامه های بازرسی فنی برای مکانیزم های مختلف تخریب
نویسنده : www.BartarFile.ir
تاریخ : دو شنبه 6 شهريور 1396
کتاب مدلسازی و تحلیل سیستم های دینامیکی (Modeling and Analysis of Dynamic Systems)، مشتمل بر 10 فصل، 558 صفحه، به زبان انگلیسی، همراه با تصاویر، فرمول ها و جداول مهم، با فرمت pdf، به ترتیب زیر گردآوری شده است:
Chapter 1: Introduction to MATLAB, Simulink, and Simscape
MATLAB Command Window and Command Prompt
User Defined Functions and Script Files
Creating a Script File
Defining and Evaluating Functions
Iterative Calculations
Matrices and Vectors
Differentiation and Integration
Plotting in MATLAB
Plotting Data Points
Plotting Analytical Expressions
Simulink
Block Library
Building a New Model
Simulation
Simscape
Block Library
Building a New Model and Simulation
Simulation
Chapter 2: Complex Analysis, Differential Equations, and Laplace Transformation
Complex Analysis
Complex Numbers in Rectangular Form
Magnitude
Complex Conjugate
Complex Numbers in Polar Form
Complex Algebra Using the Polar Form
Integer Powers of Complex Numbers
Roots of Complex Numbers
Complex Variables and Functions
Differential Equations
Linear, First-Order Differential Equations
Second-Order Differential Equations with Constant Coefficients
Homogeneous Solution
Particular Solution
Laplace Transformation
Linearity of Laplace and Inverse Laplace Transforms
Differentiation and Integration of Laplace Transforms
Differentiation of Laplace Transforms
Integration of Laplace Transforms
Special Functions
Unit-Step Function
Unit-Ramp Function
Unit-Pulse Function
Unit-Impulse (Dirac Delta) Function
The Relation between Unit-Impulse and Unit-Step
Functions
Periodic Functions
Laplace Transforms of Derivatives and Integrals
Laplace Transforms of Derivatives
Laplace Transforms of Integrals
Inverse Laplace Transformation
Partial-Fraction Expansion Method
Performing Partial Fractions in MATLAB
Convolution Method
Final-Value Theorem and Initial-Value Theorem
Final-Value Theorem
Initial-Value Theorem
Summary
Chapter 3: Matrix Analysis
Vectors and Matrices
Special Matrices
Elementary Row Operations
Rank of a Matrix
Determinant of a Matrix
Properties of Determinant
Rank in Terms of Determinant
Block Diagonal and Block Triangular Matrices
Inverse of a Matrix
Adjoint Matrix
Solution of Linear Systems of Equations
Gauss Elimination Method
Using the Inverse of the Coefficient Matrix
Cramer’s Rule
Homogeneous Systems
Matrix Eigenvalue Problem
Solving the Eigenvalue Problem
Algebraic Multiplicity and Geometric Multiplicity
Generalized Eigenvectors
Similarity Transformations
Matrix Diagonalization
Defective Matrices
Summary
Chapter 4: System Model Representation
Configuration Form
Second-Order Matrix Form
State-Space Form
State Variables, State-Variable Equations, State Equation
State-Variable Equations
State Equation
Output Equation, State-Space Form
Output Equation
State-Space Form
Decoupling the State Equation
Input–Output Equation, Transfer Function
Input–Output Equations from the System Model
Transfer Functions from the System Model
Relations between State-Space Form, Input–Output Equation and Transfer Matrix
Input–Output Equation to State-Space Form
Controller Canonical Form
State-Space Form to Transfer Matrix
Block Diagram Representation
Block Diagram Operations
Summing Junction
Series Combinations of Blocks
Parallel Combinations of Blocks
Integration
Closed-Loop Systems
Block Diagram Reduction Techniques
Moving a Branch Point
Moving a Summing Junction
Mason’s Rule
Block Diagram Construction from System Model
Linearization
Linearization of a Nonlinear Element
Functions of Two Variables
Linearization of a Nonlinear Model
Operating Point
Linearization Procedure
Small-Angle Linearization
Linearization with MATLAB Simulink
Summary
Chapter 5: Mechanical Systems
Mechanical Elements
Mass Elements
Spring Elements
Damper Elements
Equivalence
Translational Systems
Degrees of Freedom
Newton’s Second Law
Free-Body Diagrams
Static Equilibrium Position and Coordinate Reference
Massless Junctions
D’Alembert’s Principle
Rotational Systems
General Moment Equation
Modeling of Rigid Bodies in Plane Motion
Mass Moment of Inertia
Pure Rolling Motion
Mixed Systems: Translational and Rotational
Force and Moment Equations
Energy Method
Gear–Train Systems
System Modeling with Simulink and Simscape
Translational Systems
Rotational Systems
Summary
Chapter 6: Electrical, Electronic, and Electromechanical Systems
Electrical Elements
Resistors
Inductors
Capacitors
Electric Circuits
Kirchhoff’s Voltage Law
Kirchhoff’s Current Law
Node Method
Loop Method
State Variables of Circuits
Operational Amplifiers
Electromechanical Systems
Elemental Relations of Electromechanical Systems
Armature-Controlled Motors
Field-Controlled Motors
Impedance Methods
Impedances of Electric Elements
Series and Parallel Impedances
Mechanical Impedances
System Modeling with Simulink and Simscape
Electric Circuits
Operational Amplifiers
DC Motors
Summary
Chapter 7: Fluid and Thermal Systems
Pneumatic Systems
Ideal Gases
Pneumatic Capacitance
Modeling of Pneumatic Systems
Liquid-Level Systems
Hydraulic Capacitance
Hydraulic Resistance
Modeling of Liquid-Level Systems
Thermal Systems
First Law of Thermodynamics
Thermal Capacitance
Thermal Resistance
Modeling of Heat Transfer Systems
System Modeling with Simulink and Simscape
Summary
Chapter 8: System Response
Types of Response
Transient Response and Steady-State Response
Transient Response of First-Order Systems
Free Response of First-Order Systems
Impulse Response of First-Order Systems
Step Response of First-Order Systems
Ramp Response of First-Order Systems
Transient Response of Second-Order Systems
Free Response of Second-Order Systems
Initial Response in MATLAB
Impulse Response of Second-Order Systems
Impulse Response in MATLAB
Step Response of Second-Order Systems
Step Response in MATLAB
Response Analysis Using MATLAB Simulink
Frequency Response
Frequency Response of Stable, Linear Systems
Frequency Response of First-Order Systems
Frequency Response of Second-Order Systems
Bode Diagram
Plotting Bode Diagrams in MATLAB
Bode Diagram of First-Order Systems
Bode Diagram of Second-Order Systems
Solving the State Equation
Formal Solution of the State Equation
Matrix Exponential
Formal Solution in MATLAB
Solution of the State Equation via Laplace Transformation
Solution of the State Equation via State-Transition Matrix
Response of Nonlinear Systems
Numerical Solution of the State-Variable Equations
Fourth-Order Runge–Kutta Method
Response via MATLAB Simulink
Response of the Linearized Model
Summary
Chapter 9: Introduction to Vibrations
Free Vibration
Logarithmic Decrement
Coulomb Damping
Forced Vibration
Half-Power Bandwidth
Rotating Unbalance
Harmonic Base Excitation
Vibration Suppressions
Vibration Isolators
Vibration Absorbers
Modal Analysis
Eigenvalue Problem
Orthogonality of Modes
Response to Initial Excitations
Response to Harmonic Excitations
Vibration Measurement and Analysis
Vibration Measurement
System Identification
Summary
Chapter 10: Introduction to Feedback Control Systems
Basic Concepts and Terminologies
Stability and Performance
Stability of Linear Time-Invariant Systems
Time-Domain Performance Specifications
Frequency-Domain Performance Specifications
Benefits of Feedback Control
Stabilization
Disturbance Rejection
Reference Tracking
Sensitivity to Parameter Variations
Proportional–Integral–Derivative Control
Proportional Control
Proportional–Integral Control
PID Control
Ziegler–Nichols Tuning of PID Controllers
Root Locus
Root Locus of a Basic Feedback System
Analysis Using Root Locus
Control Design Using Root Locus
Bode Plot
Bode Plot of a Basic Feedback System
Analysis Using Bode Plot
Control Design Using Bode Plot
Full-State Feedback
Analysis of State-Space Equations
Control Design for Full-State Feedback
Integration of Simulink and Simscape into Control Design
Control System Simulation Using Simulink
Integration of Simscape into Control System Simulation
نویسنده : www.BartarFile.ir
تاریخ : دو شنبه 6 شهريور 1396
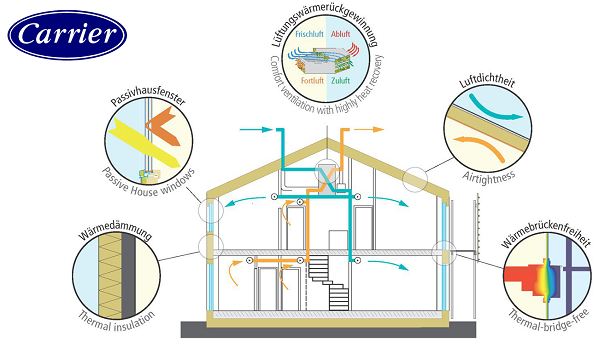
Carrier HAP یکی از قدیمی ترین و در عین حال جامع ترین نرم افزارهای موجود جهت محاسبات بار سرمایی و گرمایی ساختمان ها با کاربردهای مختلف می باشد. این نرم افزار قدرتمند امکانات بسیار زیاد و کاربردی را در عین سادگی و کاربری آسان در اختیار مهندسان تاسیسات و مکانیک قرار می دهد. گوشه ای از امکانات و ویژگیهای Carrier HAP عبارتند از:
بررسی اطلاعات مربوط به چیلرها
بررسی اطلاعات مربوط به نرخ سوخت و الکتریسیته
بررسی اطلاعات مربوط به نفوذ هوای تازه و کف ها
بررسی اشغال یا غیر اشغال بودن سیستم در تمام ساعات
سیستم های تمام هوایی حجم متغیر درجه حرارت ثابت
بررسی اطلاعات اجزاء سیستم
بررسی داده ها و اطلاعات مربوط به آب و هوا
بررسی اطلاعات مربوط به برج های خنک کننده
بررسی سیستم های تمام هوایی حجم ثابت درجه حرارت متغیر
بررسی اطلاعات مربوط به کف ها و پارتیشن ها
بررسی سیستم های WSHP
بررسی اطلاعات مربوط به فضاها و وارد کردن اطلاعات کلی
کنترل اطلاعات مربوط به واحدهای گرمایشی و سرمایشی
فرمول ها و محاسبات لازم در حاصل شدن نتایج بهتر
استفاده از امکانات مدیریت داده ها
بررسی خصوصیت مربوط به Plant ها
مدیریت اطلاعات مربوط به ناحیه ها
بررسی اطلاعات مربوط به شبیه سازی
وارد کردن اطلاعات مربوط به درب، پنجره و دیوار
بررسی اطلاعات مربوط به درجه حرارت های طرح و طراحی تششعی
دارای سیستم انبساط مستقیم
بررسی تنظیمات کلی و عمومی دستگاه ها
کنترل اطلاعات مربوط به ساختمان ها
آشنایی با مفاهیم مربوط به سیستم ها و دستگاه ها
بررسی تنظیمات و اطلاعات پارامترهای طراحی
وارد کردن اطلاعات مربوط به سقف ها و نورگیرها
اطلاعات مربوط به سیستم ها و دستگاه ها
محاسبه بار محسوس یک فضا
خصوصیات سیستم های سرمایش و گرمایش
محاسبات جریان هوای ناحیه و جریان هوای فضا
بررسی اطلاعات مربوط به بویلرها
بررسی سیستم های موجود در تهویه مطبوع برای فضا و...
مجموعه آموزش طراحی سیستم های تهویه و طراحی مطبوع با نرم افزار Carrier، مشتمل بر 13 فایل ویدیویی، در 2 بخش، به زبان فارسی، با کیفیت عالی، 416 دقیقه (7 ساعت)، به ترتیب زیر گردآوری شده است:
نویسنده : www.BartarFile.ir
تاریخ : دو شنبه 6 شهريور 1396
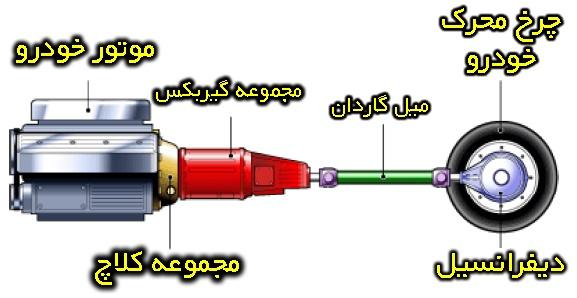
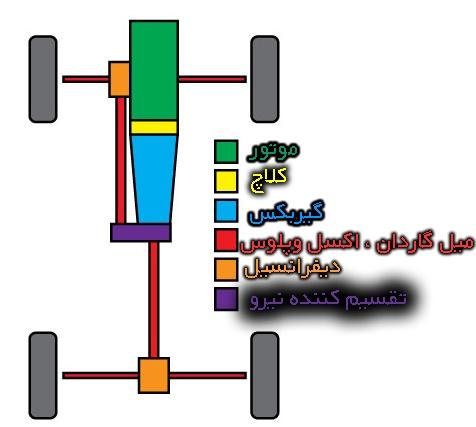
امروزه در بسیاری از فرایندهای صنعتی انتقال قدرت آن هم به صورت كم هزینه و با دقت زیاد مورد نظر است و این مسئله در صنعت خودروسازی هم بسیار مورد بحث و بررسی قرار گرفته است. سیستم انتقال قدرت دو وظیفه را در اتومبیل به عهده دارد: انتقال قدرت از موتور به چرخ های محرك و تغییر مقدار گشتاور تولیدی. گشتاور تولیدی توسط موتور پس از انتقال توسط كلاچ به جعبه دنده می رسد. وظیفه جعبه دنده انتقال دور موتور با نسبت های گوناگون و رساندن آن به خطوط انتقال و میل گاردان در خودروهای دیفرانسیل عقب یا مستقیما از گیربكس به دیفرانسیل در خودروهای دیفرانسیل جلو است. سیستم جعبه دنده انتقال قدرت را می توان به دو گروه جعبه دنده دستی و جعبه دنده اتوماتیك تقسیم بندی نمود. در این جزوه سعی شده تا در مورد سیستم كلاچ، جعبه دنده دستی و اتوماتیك انتقال قدرت و تفاوت های آنها، سیستم جامع انتقال قدرت متغیر CVT، دیفرانسیل و ترنسفر و ... مطالبی عنوان شده و به بحث و بررسی در مورد آنها پرداخته شود...
نویسنده : www.BartarFile.ir
تاریخ : دو شنبه 6 شهريور 1396
مکانیزم های انتقال قدرت، وظیفه دارند قدرت و گشتاوری که در موتور خودرو تولید شده را به چرخ های خودرو منتقل نمایند. خروجی موتور خودرو یک شفت می باشد (شفت به میله ای گفته می شود که با چرخش خود، قدرت را منتقل می کند). برای اینکه انرژی این شفت به چرخ های خودرو منتقل شود، نیاز به سیستم انتقال قدرت می باشد. در خودرو ها این شفت خروجی از موتور وارد مجموعه ای به اسم کلاچ می شود. در شکل زیر به صورت شماتیک مکانیزم یک خودرو نشان داده شده است. همانطور که مشاهده می کنید، سمت چپ تصویر موتور خودرو قرار دارد که با رنگ خاکستری مشخص شده و شفت خروجی موتور وارد مجموعه ای به اسم کلاچ می شود که وظیفه آن ارتباط و قطع ارتباط موتور و سیستم انتقال قدرت می باشد و پس از کلاچ مجموعه سیستم انتقال قدرت قرار دارد که در این پروژه تک تک اجزاء مهم آن بررسی می شود...
نویسنده : www.BartarFile.ir
تاریخ : دو شنبه 6 شهريور 1396
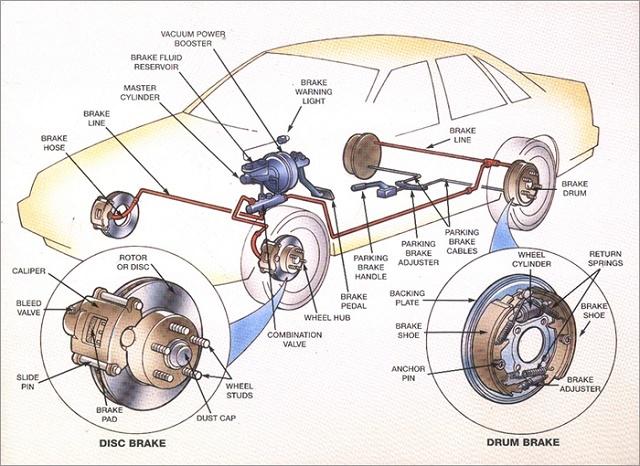
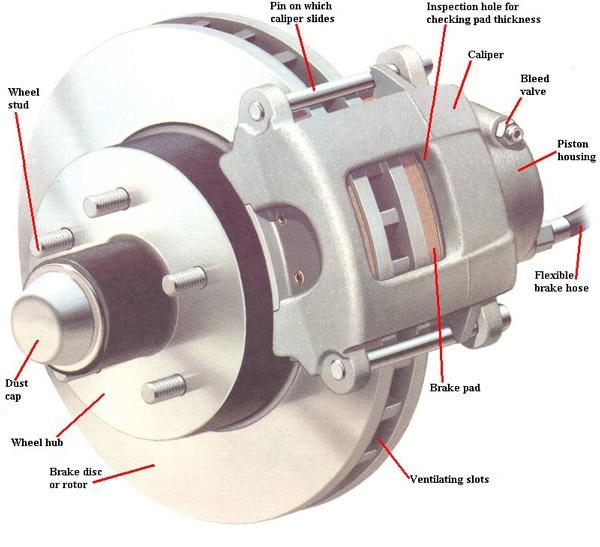
کار ترمز ایجاد شتاب منفی لازم برای توقف خودروی در حال حرکت است. علاوه بر متوقف کردن کامل خودرو، کنترل حرکت خودرو در سراشیبی، توقف مرحله ای و کاهش سرعت به اندازه دلخواه را می توان از وظایف اصلی این سیستم دانست. حال برای توقف خودرو نیاز به عضوی است که نیروی اصطکاک منفی (مخالف حرکت گردشی چرخ) را برای ما ایجا نماید، این عضو لنت نام دارد. لنت ترمز، به دیسک یا کاسه ترمز وارد می شود تا اصطکاکی مناسب برای ایجاد شتاب منفی در خودرو ایجاد نماید. سیستم های تعلیق و کنترل پایداری خودرو، به منظور افزایش کنترل راننده بر خودرو و اعمال بهترین نیروی ترمز بر چرخ ها و در نتیجه خودرو، اختراع شده اند. کنترل فرمان این سیستم ها الکترونیکی بوده و نرم افزار این سیستم ها با گذر زمان پیشرفت های قابل توجهی داشته اند...
برتر فایل یک سایت مرجع با هدف انتشار تحقیق، مقاله، پایان نامه، پاورپوینت، جزوه، کتاب و همچنین فایل های آموزشی از نرم افزار پیشرفته CATIA در زمینه رشته مهندسی مکانیک است که به منظور دسترسی راحت تر، سریع تر و ارزان تر شما دانشجویان و پژوهشگران به تحقیقات مد نظرتان تاسیس شده است.













 آمار
وبلاگ:
آمار
وبلاگ: